The session is approaching, and it's time for us to move from theory to practice. Over the weekend, we sat down and thought that many students would do well to have a collection of basic physics formulas handy. Dry formulas with explanation: short, concise, nothing more. A very useful thing when solving problems, you know. Yes, and in the exam, when exactly what was cruelly memorized the day before can “jump out” of my head, such a selection will serve you well.
Most of the tasks are usually given in the three most popular sections of physics. it Mechanics, thermodynamics and Molecular physics, electricity. Let's take them!
Basic formulas in physics dynamics, kinematics, statics
Let's start with the simplest. Good old favorite rectilinear and uniform movement.
Kinematic formulas:
Of course, let's not forget about the movement in a circle, and then move on to the dynamics and Newton's laws.

After the dynamics, it's time to consider the conditions for the equilibrium of bodies and liquids, i.e. statics and hydrostatics

Now we give the basic formulas on the topic "Work and energy". Where would we be without them!

Basic formulas of molecular physics and thermodynamics
Let's finish the section of mechanics with formulas for vibrations and waves and move on to molecular physics and thermodynamics.

Efficiency, Gay-Lussac's law, the Clapeyron-Mendeleev equation - all these sweet formulas are collected below.
By the way! There is a discount for all our readers 10% on the .

Basic formulas in physics: electricity
It's time to move on to electricity, although thermodynamics loves it less. Let's start with electrostatics.


And, to the drum roll, we finish with the formulas for Ohm's law, electromagnetic induction and electromagnetic oscillations.

That's all. Of course, a whole mountain of formulas could be given, but this is useless. When there are too many formulas, you can easily get confused, and then completely melt the brain. We hope that our cheat sheet of basic formulas in physics will help you solve your favorite problems faster and more efficiently. And if you want to clarify something or did not find it desired formula: ask the experts student service. Our authors keep hundreds of formulas in their heads and click tasks like nuts. Contact us, and soon any task will be "too tough" for you.
Basic units of measurement in the SI system are:
- length unit - meter (1 m),
- time - second (1 s),
- mass - kilogram (1 kg),
- amount of substance - mol (1 mol),
- temperature - kelvin (1 K),
- electric current strength - ampere (1 A),
- For reference: the strength of light - candela (1 cd, actually not used in solving school problems).
When performing calculations in the SI system, angles are measured in radians.
If the problem in physics does not indicate in which units the answer should be given, it must be given in units of the SI system or in derived quantities corresponding to the physical quantity that is asked in the problem. For example, if the task requires finding the speed, and it does not say how it should be expressed, then the answer must be given in m/s.
For convenience, in physics problems it is often necessary to use submultiple (reducing) and multiple (increasing) prefixes. they can be applied to any physical quantity. For example, mm is a millimeter, kt is a kiloton, ns is a nanosecond, Mg is a megagram, mmol is a millimol, µA is a microampere. Remember that there are no double prefixes in physics. For example, a microgram is a microgram, not a millikilogram. Please note that when adding and subtracting values, you can only operate with values of the same dimension. For example, kilograms can only be added to kilograms, millimeters can only be subtracted from millimeters, and so on. When converting values, use the following table.
Path and movement
kinematics called a branch of mechanics in which the movement of bodies is considered without clarifying the causes of this movement.
Mechanical movement body is called the change in its position in space relative to other bodies over time.
Every body has a certain size. However, in many problems of mechanics there is no need to indicate the positions of individual parts of the body. If the dimensions of the body are small compared to the distances to other bodies, then this body can be considered material point. So when driving a car over long distances, you can neglect its length, since the length of the car is small compared to the distance it travels.
It is intuitively clear that the characteristics of movement (speed, trajectory, etc.) depend on where we look at it from. Therefore, to describe the motion, the concept of a frame of reference is introduced. Reference system (CO)- a set of a reference body (it is considered absolutely solid), a coordinate system attached to it, a ruler (a device that measures distances), a clock and a time synchronizer.
Moving over time from one point to another, the body (material point) describes a certain line in the given CO, which is called trajectory of the body.
By moving the body called a directed segment of a straight line connecting the initial position of the body with its final position. Displacement is a vector quantity. The displacement can increase, decrease and become equal to zero in the process of movement.
Passed path is equal to the length of the trajectory traveled by the body in some time. The path is a scalar value. The path cannot be reduced. The path only increases or remains constant (if the body is not moving). When a body moves along a curvilinear trajectory, the module (length) of the displacement vector is always less than the distance traveled.
At uniform(constant speed) moving way L can be found using the formula:
where: v- the speed of the body, t- the time during which it moved. When solving problems in kinematics, displacement is usually found from geometric considerations. Often geometric considerations for finding displacement require knowledge of the Pythagorean theorem.
average speed
Speed- vector quantity characterizing the speed of movement of the body in space. The speed is medium and instantaneous. The instantaneous speed describes the movement at a given specific moment of time at a given specific point in space, and the average speed characterizes the entire movement as a whole, in general, without describing the details of the movement in each specific area.
Average travel speed is the ratio of the entire journey to the total travel time:

where: L full - the entire path that the body has traveled, t full - all the time of movement.
Average travel speed is the ratio of the total displacement to the total travel time:

This value is directed in the same way as the total displacement of the body (that is, from the starting point of the movement to the end point). At the same time, do not forget that the total displacement is not always equal to the algebraic sum of displacements at certain stages of movement. The full displacement vector is equal to the vector sum of the displacements at the individual stages of the movement.
- When solving problems in kinematics, do not make a very common mistake. The average speed, as a rule, is not equal to the arithmetic average of the speeds of the body at each stage of movement. The arithmetic mean is obtained only in some special cases.
- And even more so, the average speed is not equal to one of the speeds with which the body moved in the process of movement, even if this speed had an approximately intermediate value relative to other speeds with which the body moved.
Uniformly accelerated rectilinear motion
Acceleration is a vector physical quantity that determines the rate of change in the speed of the body. The acceleration of a body is the ratio of the change in speed to the period of time during which the change in speed took place:
![]()
where: v 0 is the initial speed of the body, v is the final velocity of the body (that is, after a period of time t).
Further, unless otherwise specified in the condition of the problem, we assume that if the body moves with acceleration, then this acceleration remains constant. This body movement is called uniformly accelerated(or equally variable). With uniformly accelerated motion, the speed of the body changes by the same amount in any equal intervals of time.
Uniformly accelerated motion is actually accelerated when the body increases the speed of movement, and slowed down when the speed decreases. For ease of solving problems, it is convenient to take acceleration with the “-” sign for slow motion.
From the previous formula, another more common formula follows, describing speed change over time with uniformly accelerated motion:
Move (but not path) with uniformly accelerated motion is calculated by the formulas:

![]()
In the last formula, one feature of uniformly accelerated motion is used. With uniformly accelerated motion, the average speed can be calculated as the arithmetic mean of the initial and final speeds (this property is very convenient to use when solving some problems):
With the calculation of the path is more difficult. If the body did not change the direction of motion, then with uniformly accelerated rectilinear motion, the path is numerically equal to the displacement. And if it changed, it is necessary to separately calculate the path to the stop (turn point) and the path after the stop (turn point). And simply substituting time into formulas for moving in this case will lead to a typical mistake.
Coordinate with uniformly accelerated motion, it changes according to the law:

Speed projection with uniformly accelerated motion, it changes according to the following law:
![]()
Similar formulas are obtained for the remaining coordinate axes.
Free fall vertically
All bodies in the Earth's gravitational field are affected by gravity. In the absence of support or suspension, this force causes the bodies to fall towards the surface of the Earth. If we neglect air resistance, then the movement of bodies only under the influence of gravity is called free fall. The force of gravity imparts to any body, regardless of their shape, mass and size, the same acceleration, called the acceleration of free fall. Near the surface of the earth acceleration of gravity is:
This means that the free fall of all bodies near the Earth's surface is uniformly accelerated (but not necessarily rectilinear) motion. First, consider the simplest case of free fall, when the body moves strictly vertically. Such a movement is a uniformly accelerated rectilinear movement, therefore, all previously studied patterns and tricks of such movement are also suitable for free fall. Only acceleration is always equal to the acceleration of free fall.
Traditionally, in free fall, a vertically directed OY axis is used. There is nothing terrible here. You just need in all formulas instead of the index " X" write " at". The meaning of this index and the rule for defining signs is preserved. Where to direct the OY axis is your choice, depending on the convenience of solving the problem. Options 2: up or down.
Let us give several formulas that are the solution of some specific problems in kinematics for vertical free fall. For example, the speed at which a body falling from a height will fall h without initial speed:
Time of body fall from height h without initial speed:

The maximum height to which a body is thrown vertically upwards with an initial velocity v 0 , the time for this body to rise to its maximum height, and the total flight time (until returning to the starting point):
Horizontal throw
With a horizontal throw with an initial speed v 0, it is convenient to consider the movement of the body as two movements: uniform along the OX axis (along the OX axis there are no forces preventing or helping the movement) and uniformly accelerated movement along the OY axis.
The speed at any moment of time is directed tangentially to the trajectory. It can be decomposed into two components: horizontal and vertical. The horizontal component always remains unchanged and is equal to v x= v 0 . And the vertical increases according to the laws of accelerated motion v y= gt. Wherein full body speed can be found using the formulas:
![]()
![]()
At the same time, it is important to understand that the time the body falls to the ground in no way depends on the horizontal speed with which it was thrown, but is determined only by the height from which the body was thrown. The time it takes for a body to fall to the ground is given by:

While the body is falling, it simultaneously moves along the horizontal axis. Consequently, body flight distance or the distance that the body can fly along the x-axis will be equal to:

Angle between horizon and the speed of the body can be easily found from the relation:

Also, sometimes in tasks they may ask about the point in time at which the full speed of the body will be tilted at a certain angle to vertical. Then this angle will be from the relation:


It is important to understand what kind of angle appears in the problem (with the vertical or with the horizontal). This will help you choose the right formula. If we solve this problem by the coordinate method, then the general formula for the law of coordinate change during uniformly accelerated motion is:
![]()
It is transformed into the following law of motion along the OY axis for a body thrown horizontally:
With its help, we can find the height at which the body will be at any given time. In this case, at the moment the body falls to the ground, the coordinate of the body along the OY axis will be equal to zero. It is obvious that the body moves uniformly along the OX axis, therefore, within the framework of the coordinate method, the horizontal coordinate will change according to the law:
Throw at an angle to the horizon (ground to ground)
Maximum lifting height when throwing at an angle to the horizon (relative to the initial level):

Time to climb to maximum height when throwing at an angle to the horizon:

Flight range and total flight time of a body thrown at an angle to the horizon (provided that the flight ends at the same height from which it started, i.e. the body was thrown, for example, from ground to ground):

The minimum speed of a body thrown at an angle to the horizon is at the highest point of the ascent, and is equal to:
The maximum speed of a body thrown at an angle to the horizon is at the moments of throwing and falling to the ground, and is equal to the initial one. This statement is only true for ground-to-ground throws. If the body continues to fly below the level from which it was thrown, then it will acquire more and more speed there.
Addition of speeds
The motion of bodies can be described in different frames of reference. From the point of view of kinematics, all frames of reference are equal. However, the kinematic characteristics of motion, such as trajectory, displacement, speed, turn out to be different in different systems. Values that depend on the choice of the reference frame in which they are measured are called relative. Thus, rest and movement of the body are relative.
Thus, the absolute speed of a body is equal to the vector sum of its speed relative to the moving coordinate system and the speed of the moving reference system itself. Or, in other words, the speed of a body in a fixed frame of reference is equal to the vector sum of the speed of the body in a moving frame of reference and the speed of the moving frame relative to the fixed one.
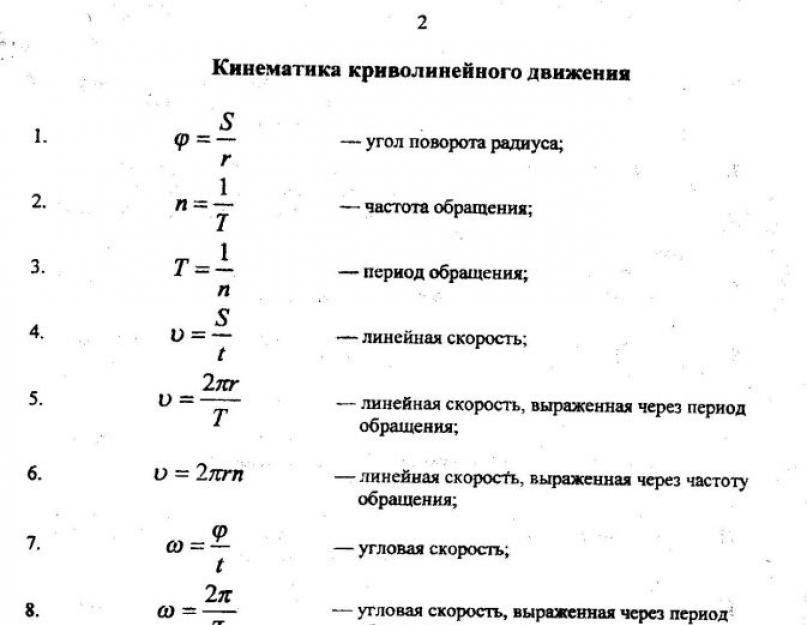
Uniform circular motion
The motion of a body in a circle is a special case of curvilinear motion. This type of motion is also considered in kinematics. With curvilinear motion, the velocity vector of the body is always directed tangentially to the trajectory. The same thing happens when moving in a circle (see figure). The uniform motion of a body in a circle is characterized by a number of quantities.

Period is the time it takes for a body to make one complete revolution in a circle. The unit of measurement is 1 s. The period is calculated by the formula:
Frequency- the number of revolutions that the body made, moving in a circle, per unit time. The unit of measurement is 1 rpm or 1 Hz. The frequency is calculated by the formula:
In both formulas: N- the number of revolutions per time t. As can be seen from the above formulas, the period and frequency of the quantities are mutually inverse:
![]()
At uniform rotation speed body will be defined as follows:
![]()
where: l- the circumference or the path traveled by the body in a time equal to the period T. When a body moves in a circle, it is convenient to consider the angular displacement φ (or angle of rotation), measured in radians. angular velocity ω body at a given point is called the ratio of small angular displacement Δ φ to a small time interval Δ t. Obviously, for a time equal to the period T the body passes an angle equal to 2 π , therefore, with uniform motion along a circle, the formulas are fulfilled:
![]()
Angular velocity is measured in rad/s. Remember to convert angles from degrees to radians. Arc length l is related to the angle of rotation by the relation:
Communication between Line Rate Module v and angular velocity ω :
![]()
When a body moves along a circle with a constant modulo speed, only the direction of the velocity vector changes, therefore, the motion of a body along a circle with a constant modulo speed is motion with acceleration (but not uniformly accelerated), since the direction of the velocity changes. In this case, the acceleration is directed along the radius towards the center of the circle. It is called normal, or centripetal acceleration, since the acceleration vector at any point of the circle is directed towards its center (see figure).

Centripetal acceleration module associated with linear v on this site. To do this, you need nothing at all, namely: to devote three to four hours every day to preparing for the CT in physics and mathematics, studying theory and solving problems. The fact is that the DT is an exam where it is not enough just to know physics or mathematics, you also need to be able to quickly and without failures solve a large number of problems on various topics and varying complexity. The latter can only be learned by solving thousands of problems.
Successful, diligent and responsible fulfillment of these three points, as well as responsible study of the final training tests, will allow you to show an excellent result on the CT, the maximum of what you are capable of.
Found an error?
If you think you have found an error in training materials, then please write about it by e-mail (). In the letter, indicate the subject (physics or mathematics), the name or number of the topic or test, the number of the task, or the place in the text (page) where, in your opinion, there is an error. Also describe what the alleged error is. Your letter will not go unnoticed, the error will either be corrected, or you will be explained why it is not a mistake.
In order to understand what mechanics studies, it is necessary to consider what motion means in the most general sense. The meaning of this word implies a change in something. For example, a political movement advocates the equality of different segments of the population, regardless of their race. Previously, it did not exist, then something changed and now every person has equal rights. This is the movement of civilization forward. Another example is environmental. In the past, having got out into nature, no one thought about what the garbage leaves behind. Today, any civilized person will collect it and take it to a specially designated place for further disposal.
Something similar can be observed in mechanics. With mechanical movement, the position of the body in space relative to other objects changes over time. The main task of mechanics is to indicate where the object is at any moment, even taking into account the one that has not yet arrived. That is, to predict the position of the body at a given time, and not just to find out exactly where in space it was in the past.
Kinematics is a branch of mechanics that studies the motion of a body without analyzing its causes. This means that it teaches not to explain, but to describe. That is, to come up with a way by which one could set the position of the body at any time. The basic concepts of kinematics include velocity, acceleration, distance, time, and displacement.
Difficulty in describing movement
The first problem that kinematics faces is that every body has a certain size. Suppose it is necessary to describe the movement of an object. This means learning to designate its position at any given time. But each object occupies a certain place in space. That is, that all parts of this object occupy a different position at the same time.

In this case, what point should be taken to describe the location of the entire object? If you take into account each, then the calculations will be too complicated. Therefore, the answer to this question can be simplified as much as possible. If all points of one body move in the same direction, then one such point, which this body contains, is sufficient to describe the movement.
Types of motion in kinematics
There are three types:
- Translational is a movement in which any straight line drawn in the body remains parallel to itself. For example, a car that is moving on a highway makes this kind of movement.
- Rotational is the movement of a body in which all its points move in circles with centers lying on one straight line, called the axis of rotation. For example, the rotation of the Earth about its axis.
- An oscillatory movement is a movement in which the body repeats its trajectory after a certain period of time. For example, the movement of a pendulum.
Basic concepts of kinematics - material point
Any complex movement can be described as a combination of two simple types - translational and rotational. For example, the wheel of a car or a top standing on a moving straight platform participate simultaneously in these two types of movement.

But what if the movement of the body cannot be represented as a combination? For example, if a car is driving on a bumpy road, its position will change in a very complex way. If we only count that this transport moves from one city to another, then in such a situation it does not matter what size the body moves from point A to point B and it can be neglected. In this case, it is only important for how long the car traveled a certain distance and at what speed it was moving.
However, it should be taken into account that neglecting the size is not allowed in every problem. For example, if you calculate the movement when parking a car, then ignoring the size of a given body will lead to a detrimental effect. Therefore, only in those situations when, within the framework of a specific task, the dimensions of a moving object can be neglected, then such a body is usually called a material point.
Kinematic formulas
The numbers by which the position of a point in space is specified are called coordinates. To define it on a straight line, one number is enough; when it comes to the surface, then two, about space - three. More numbers in the three-dimensional world (to describe the position of a material point) are not required.

There are three basic equations for the concept of kinematics, as a section on the movement of bodies:
- v = u + at.
- S = ut + 1/2at 2 .
- v 2 = u 2 + 2as.
v = final speed,
u = initial speed,
a = acceleration,
s = distance traveled by the body,
Kinematic formulas in one-dimensional space:
X - X o = V o t + 1/2a t2
V 2 \u003d V o 1 + 2a (X - X o)
X - X o \u003d 1 \ 2 (V o + V) t
Where,
V - final speed (m / s),
V o - initial speed (m / s),
a - acceleration (m / s 2),
t - time (s),
X - end position (m),
Formulas of kinematics in two-dimensional space
Since the following equations are used to describe a material point on a plane, it is worth considering the X and Y axis.
Given the X direction:
a x = constant
V fx = V i x + a x Δt
X f = X i + V i x Δt +1/2a x Δt 2
Δt \u003d V fx -V ix /a x
V fx 2 = V ix 2 + 2ax Δx
X f \u003d X i + 1/2 (V fx + V ix) Δ t.
And given the y direction:
a y = constant
V fy = V iy + a y Δt
y f = y i + V iy Δt + 1/2 a x Δt 2
Δt = Vfy - V iy /a y
V fy 2 = V iy 2 + 2 ay Δ y
y f = y i +1/2 (V fy + V iy) Δt.
V f - final speed (m / s),
V i - initial speed (m / s),
a - acceleration (m / s 2),
t - time (s),
X - end position (m),
X 0 - initial position (m).
The movement of a thrown projectile is the best example for describing the movement of an object in two dimensions. Here the body moves both in the vertical position Y and in the horizontal position X, so we can say that the object has two speeds.
Examples of tasks in kinematics
Task 1: The initial speed of the truck is zero. Initially, this object is at rest. A uniform acceleration begins to act on it during a time interval of 5.21 seconds. The distance traveled by the truck is 110 m. Find the acceleration.
Solution:
Distance traveled s = 110 m,
initial speed v i = 0,
time t = 5.21 s,
acceleration a=?
Using the basic concepts and formulas of kinematics, we can conclude that,
s \u003d v i t + 1/2 a t 2,
110 m = (0) × (5.21) + 1/2 × a (5.21) 2 ,
a \u003d 8.10 m / s 2.
Task 2: The point moves along the x-axis (in cm), after t seconds of travel, it can be represented using the equation x = 14t 2 - t + 10. Need to find the average speed of the point, provided that t = 3s?
Solution:
The position of the point at t = 0 is x = 10 cm.
At t = 3s, x = 133 cm.
Average speed, V av = Δx/Δt = 133-10/3-0 = 41 cm/s.
What is the reference body
We can talk about movement only if there is something relative to which a change in the position of the object under study is considered. Such an object is called a body of reference and it is conditionally always taken as immovable.
If the task does not indicate in which reporting system the material point moves, then the reference body is considered to be the earth by default. However, this does not mean that any other convenient for calculation cannot be taken as an object motionless at a given moment of time, relative to which the movement is made. For example, a moving train turning a car can be taken as the body of reference, and so on.
Reference system and its significance in kinematics
Three components are needed to describe movement:
- Coordinate system.
- Count body.
- A device for measuring time.

The body of reference, the coordinate system associated with it and the device for measuring time form the reference frame. It is meaningless to talk about movement if it is not indicated. A correctly chosen reference system makes it possible to simplify the description of the movement and, conversely, complicate it if it is chosen unsuccessfully.
It is for this reason that mankind has long believed that the Sun moves around the Earth and that it is at the center of the universe. Such a complex movement of the luminaries, due to the fact that earthly observers are in a reference frame that moves in a very intricate way. The earth rotates around its axis and simultaneously around the sun. In fact, if you change the reference system, then all the movements of celestial bodies are easily described. This was once done by Copernicus. He offered his own description of the world order in which the Sun is motionless. With respect to it, it is much easier to describe the motion of the planets than if the reference body is the Earth.

Basic concepts of kinematics - path and trajectory
Let some point at first be in position A, after some time it was in position B. One line can be drawn between them. But in order for this straight line to carry more information about the movement, that is, it was clear where and where the body was moving from, it should not be just a segment, but a directed one, usually denoted by the letter S. The movement of the body is a vector drawn from the initial position of the object to final.

If the body was originally at point A, and then ended up at point B, this does not mean that it moved only in a straight line. There are an infinite number of ways to get from one position to another. The line along which the body moves is another basic concept of kinematics - the trajectory. And its length is called the path, which is usually denoted by the letters L or l.
Definition 1
Kinematics- this is a branch of mechanics that considers the movement of bodies without explaining the causes that cause it.
Definition 2
Mechanical movement of the body is a change in the position of a given body in space relative to other bodies in time.
As we said, the mechanical motion of a body is relative. The motion of the same body relative to different bodies can be different.
Definition 3
To characterize the movement of a body, it is indicated in relation to which of the bodies this movement is considered. This will reference body.
Definition 4
Reference system− coordinate system, which is associated with the body of reference and the time for reference. It allows you to determine the position of a moving body at any time.
In C I, the unit of length is the meter, and the unit of time is the second.
Every body has a certain size. Different parts of the body are located in different spatial locations. But in most problems of mechanics, it is not necessary to indicate the position of individual parts of the body. If the dimensions of the body are small compared to the distances to other bodies, then the given body is considered to be its material point. This is how one proceeds when studying the movement of planets around the Sun.
Definition 5
Mechanical movement is called progressive, if all parts of the body move in the same way.
Example 1
Translational movement is observed near the cabins in the Ferris Wheel attraction or near the car on a straight section of the track.
In the translational motion of the body, it is also considered as a material point.
Definition 6
Material point is a body whose dimensions under given conditions can be neglected.
The term "material point" is important in mechanics.
Definition 7
body trajectory− some line, which a body or a material point describes, moving in time from one point to another.
The location of a material point in space in any time interval (the law of motion) is determined using the time dependence of the coordinates x = x (t) , y = y (t) , z = z (t) or the time dependence of the radius vector r → = r → (t) drawn from the origin to the given point. This is clearly shown in Figure 1. one . one .
Picture 1 . 1 . 1 . Determining the position of a point using the coordinates x = x (t) , y = y (t) and z = z (t) and the radius vector r → (t) , r 0 →is the radius vector of the position of the point at the initial moment of time.
Definition 8
body movements → = ∆ r → = r → - r 0 →- this is a directed straight line segment that connects the initial position of the body with its further position. Displacement is a vector quantity.
The distance traveled l is equal to the length of the arc of the trajectory covered by the body in a certain time t. The path is a scalar value.
If the movement of the body is considered for a fairly short period of time, then the displacement vector turns out to be directed tangentially to the trajectory at a given point, and its length is equal to the distance covered.
In the case of a small time interval Δ t, the path Δ l overcome by the body practically coincides with the modulus of the displacement vector ∆ s → . When moving a body along a curvilinear trajectory, the module of the motion vector is always less than the distance traveled (Figure 1 . 1 . 2).

Picture 1 . one . 2. Distance traveled l and displacement vector∆s → during curvilinear motion of the body.
a and b are the start and end points of the path.
To describe motion in physics, the concept of average velocity is introduced: υ → = ∆ s → ∆ t = ∆ r → ∆ t .
Physicists are more interested in the formula not for the average, but for the instantaneous speed, which is calculated as the limit to which the average speed tends over an infinitesimal time interval Δ t, that is, υ → = ∆ s → ∆ t = ∆ r → ∆ t; ∆t → 0 .
In mathematics, this limit is called the derivative and is denoted d r → d t or r → ˙.
The instantaneous velocity υ → of the body at each point of the curvilinear trajectory is directed tangentially to the trajectory at a given point. Figure 1 shows the difference between average and instantaneous speeds. one . 3 .

Picture 1 . 1 . 3 . Average and instantaneous speeds. ∆s 1 → , ∆s 2 → , ∆s 3 →- movement in time∆t1< ∆ t 2 < ∆ t 3 respectively. Att → 0 , υ → c p → υ → .
When moving a body along a curvilinear trajectory, the speed υ → changes in absolute value and in direction. The change in the velocity vector υ → for some small period of time Δ t is set using the vector Δ υ → (Figure 1 . 1 . 4).
The velocity change vector ∆ υ → = υ 2 → - υ 1 → for a short period of time Δ t is decomposed into 2 components: ∆ υ r → , which is directed along the vector υ → (tangential component) and ∆ υ n → , which is directed perpendicular to the vector υ → (normal component).

Picture 1 . one . four . Change in the velocity vector in magnitude and direction.∆υ → = ∆υ → r + ∆υ → n - change in the velocity vector over a period of time Δ t .
Definition 9
instant body acceleration a → is the limit of the ratio of a small change in speed ∆ υ → to a short period of time Δ t , during which the speed changed: a → = ∆ υ → ∆ t = ∆ υ → τ ∆ t + ∆ υ → n ∆ t ; (∆t → 0) .
The direction of the acceleration vector a → , in curvilinear motion, does not coincide with the direction of the velocity vector υ → . The components of the acceleration vector a → are tangent (tangential) a → τ and normal a → n accelerations (Figure 1 . 1 . 5).

Picture 1 . 1 . 5 . Tangent and normal acceleration.
The tangential acceleration shows how quickly the speed of the body changes modulo: a τ = ∆ υ ∆ t ; ∆t → 0 .
The vector a → τ is directed tangentially to the trajectory.
Normal acceleration measures how quickly the speed of an object changes direction.
Example 2
Let's imagine a curvilinear movement as movement along arcs of circles (Figure 1.1.6).

Picture 1 . one . 6. Movement along arcs of circles.
Normal acceleration depends on the module of speed υ and the radius R of the circle along the arc of which the body moves at a certain moment of time: a n = υ 2 R .
The vector a n → is always directed towards the center of the circle.
According to figure 1. one . 5 it can be seen that the total acceleration module is equal to a = a τ 2 + a n 2 .
So, the main physical quantities in the kinematics of a material point are the distance traveled l , displacement s → , speed υ → and acceleration a → .
The path l is a scalar quantity.
Displacement s → , speed υ → and acceleration a → are vector quantities.
In order to set any vector quantity, it is necessary to set its modulus and determine the direction. Vectors obey mathematical rules: they can be projected onto coordinate axes, added, subtracted, etc.
If you notice a mistake in the text, please highlight it and press Ctrl+Enter
First of all, it should be noted that we are talking about a geometric point, that is, a region of space that has no dimensions. It is for this abstract image (model) that all the definitions and formulas presented below are valid. However, for the sake of brevity, I will often refer to the motion body, object or particles. I do this only to make it easier for you to read. But always remember that we are talking about a geometric point.
Radius vector points is a vector whose beginning coincides with the origin of the coordinate system and whose end coincides with the given point. The radius vector is usually denoted by the letter r. Unfortunately, some authors refer to it as s. Strongly advise do not use designation s for the radius vector. The fact is that the vast majority of authors (both domestic and foreign) use the letter s to denote a path, which is a scalar and, as a rule, has nothing to do with the radius vector. If you denote the radius vector as s you can easily get confused. Once again, we are like everyone else normal people, we will use the following notation: r is the radius vector of the point, s is the path traveled by the point.
Displacement vector(often just say - moving) - this is vector, the beginning of which coincides with the point of the trajectory where the body was when we began to study this movement, and the end of this vector coincides with the point of the trajectory where we finished this study. We will denote this vector as Δ r. The use of the symbol Δ is obvious: Δ r is the difference between the radius vector r the end point of the studied segment of the trajectory and the radius vector r 0 point of the beginning of this segment (Fig. 1), that is, Δ r= r − r 0 .

Trajectory is the line along which the body moves.
Path- this is the sum of the lengths of all sections of the trajectory successively traversed by the body during movement. It is denoted either ∆S, if we are talking about a section of the trajectory, or S, if we are talking about the entire trajectory of the observed movement. Sometimes (rarely) the path is also denoted by another letter, for example, L (just don't denote it as r, we already talked about this). Remember! The path is positive scalar! The path in the process of movement can only increase.
Average travel speed v Wed
v cf = ∆ r/Δt.
Instantaneous movement speed v is the vector defined by the expression
v=d r/dt.
Average travel speed v cp is the scalar defined by the expression
Vav = ∆s/∆t.
Other notations are often used, for example,
Instantaneous travel speed v is the scalar defined by the expression
The modulus of the instantaneous speed of movement and the instantaneous speed of the path are the same, since dr = ds.
Average acceleration a
a cf = ∆ v/Δt.
Instant Boost(or simply, acceleration) a is the vector defined by the expression
a=d v/dt.
Tangential (tangential) acceleration aτ (the subscript is the Greek lowercase letter tau) is vector, which is vector projection instantaneous acceleration on the tangential axis.
Normal (centripetal) acceleration a n is vector, which is vector projection instantaneous acceleration on the normal axis .
Tangential acceleration modulus
| aτ | = dv/dt,
That is, it is the derivative of the module of instantaneous velocity with respect to time.
Normal acceleration module
| a n | = v 2 /r,
Where r is the value of the radius of curvature of the trajectory at the point where the body is located.
Important! I would like to draw your attention to the following. Do not get confused with the notation regarding tangential and normal accelerations! The fact is that in the literature on this subject there is traditionally a complete leapfrog.
Remember!
a t is vector tangential acceleration,
a n is vector normal acceleration.
aτ and a n are vector full acceleration projections a on the tangent axis and the normal axis, respectively,
A τ is the projection (scalar!) of the tangential acceleration onto the tangential axis,
A n is the projection (scalar!) of the normal acceleration onto the normal axis,
| aτ | is module vector tangential acceleration,
| a n | - this is module vector normal acceleration.
Especially do not be surprised if, reading in the literature about curvilinear (in particular, rotational) motion, you find that the author understands a τ as a vector, and its projection, and its modulus. The same applies to a n . Everything, as they say, "in one bottle." And, unfortunately, this is all too often the case. Even textbooks for high school are no exception, in many of them (believe me, in most!) there is complete confusion about this.
So, without knowing the basics of vector algebra or neglecting them, it is very easy to get completely confused when studying and analyzing physical processes. Therefore, knowledge of vector algebra is the most important condition for success in the study of mechanics. And not just mechanics. In the future, when studying other branches of physics, you will repeatedly be convinced of this.
Instantaneous angular velocity(or simply, angular velocity) ω is the vector defined by the expression
ω =d φ /dt,
Where d φ - an infinitesimal change in the angular coordinate (d φ - vector!).
Instantaneous angular acceleration(or simply, angular acceleration) ε is the vector defined by the expression
ε =d ω /dt.
Connection between v, ω and r:
v = ω × r.
Connection between v, ω and r:
Connection between | aτ |, ε and r:
| aτ | = ε r.
Now let's move on to kinematic equations specific types of movement. These equations must be learned by heart.
Kinematic equation of uniform and rectilinear motion looks like:
r = r 0 + v t,
Where r is the radius vector of the object at time t, r 0 - the same at the initial time t 0 (at the start of observations).
Kinematic equation of motion with constant acceleration looks like:
r = r 0 + v 0 t + a t 2 /2, where v 0 the speed of the object at the moment t 0 .
The equation for the speed of a body when moving with constant acceleration looks like:
v = v 0 + a t.
Kinematic equation of uniform circular motion in polar coordinates looks like:
φ = φ 0 + ω z t,
Where φ is the angular coordinate of the body at a given moment of time, φ 0 is the angular coordinate of the body at the moment the observation begins (at the initial moment of time), ω z is the projection of the angular velocity ω on the Z-axis (usually this axis is chosen perpendicular to the plane of rotation).
Kinematic equation of circular motion with constant acceleration in polar coordinates looks like:
φ = φ 0 + ω 0z t + ε z t 2 /2.
Kinematic equation harmonic vibrations along the x-axis looks like:
X \u003d A Cos (ω t + φ 0),
Where A is the amplitude of the oscillations, ω is the cyclic frequency, φ 0 is the initial phase of the oscillations.
The projection of the velocity of a point oscillating along the X axis onto this axis is equal to:
V x = − ω A Sin (ω t + φ 0).
The projection of the acceleration of a point oscillating along the X axis onto this axis is equal to:
A x \u003d - ω 2 A Cos (ω t + φ 0).
Connection between the cyclic frequency ω, the ordinary frequency ƒ and the oscillation period T:
ω \u003d 2 πƒ \u003d 2 π / T (π \u003d 3.14 - the number of pi).
Mathematical pendulum has an oscillation period T, determined by the expression:
In the numerator of the radical expression is the length of the pendulum thread, in the denominator is the acceleration of free fall
Connection between absolute v abs, relative v rel and figurative v lane speeds:
v abs = v rel + v per.
Here, perhaps, are all the definitions and formulas that may be needed when solving problems in kinematics. The information provided is for reference only and cannot replace an e-book where the theory of this section of mechanics is presented in an accessible, detailed and, I hope, fascinating way.


