La sessione si avvicina ed è tempo per noi di passare dalla teoria alla pratica. Durante il fine settimana, ci siamo seduti e abbiamo pensato che molti studenti avrebbero fatto bene a tenere a portata di mano una raccolta di formule di fisica di base. Formule asciutte con spiegazione: brevi, concise, niente di più. Una cosa molto utile quando si risolvono i problemi, lo sai. Sì, e all'esame, quando esattamente ciò che è stato crudelmente memorizzato il giorno prima può "saltare fuori" dalla mia testa, una tale selezione ti servirà bene.
La maggior parte dei compiti sono solitamente assegnati nelle tre sezioni più popolari della fisica. esso Meccanica, termodinamica e Fisica molecolare, elettricità. Prendiamoli!
Formule di base in fisica dinamica, cinematica, statica
Cominciamo con il più semplice. Il buon vecchio movimento rettilineo e uniforme preferito.
Formule cinematiche:
Ovviamente non dimentichiamoci del movimento in cerchio, per poi passare alla dinamica e alle leggi di Newton.

Dopo la dinamica, è il momento di considerare le condizioni per l'equilibrio di corpi e liquidi, cioè statica e idrostatica

Ora diamo le formule di base sull'argomento "Lavoro ed energia". Dove saremmo senza di loro!

Formule di base di fisica molecolare e termodinamica
Concludiamo la sezione di meccanica con le formule per le vibrazioni e le onde e passiamo alla fisica molecolare e alla termodinamica.

Efficienza, legge di Gay-Lussac, equazione di Clapeyron-Mendeleev: tutte queste dolci formule sono raccolte di seguito.
A proposito! C'è uno sconto per tutti i nostri lettori 10% sul .

Formule di base in fisica: elettricità
È tempo di passare all'elettricità, anche se la termodinamica la ama di meno. Cominciamo con l'elettrostatica.


E, al rullo di tamburi, finiamo con le formule per la legge di Ohm, l'induzione elettromagnetica e le oscillazioni elettromagnetiche.

È tutto. Certo, si potrebbe dare un'intera montagna di formule, ma questo è inutile. Quando ci sono troppe formule, puoi facilmente confonderti e quindi sciogliere completamente il cervello. Ci auguriamo che il nostro cheat sheet delle formule di base della fisica ti aiuti a risolvere i tuoi problemi preferiti in modo più rapido ed efficiente. E se vuoi chiarire qualcosa o non l'hai trovato formula desiderata: chiedi agli esperti servizio agli studenti. I nostri autori tengono in testa centinaia di formule e fanno clic su attività come noci. Contattaci, e presto qualsiasi compito sarà "troppo difficile" per te.
Unità di misura di base nel sistema SI sono:
- unità di lunghezza - metro (1 m),
- tempo - secondo (1 s),
- massa - chilogrammo (1 kg),
- quantità di sostanza - mol (1 mol),
- temperatura - kelvin (1 K),
- intensità di corrente elettrica - ampere (1 A),
- Per riferimento: la forza della luce - candela (1 cd, attualmente non utilizzato per risolvere i problemi scolastici).
Quando si eseguono calcoli nel sistema SI, gli angoli vengono misurati in radianti.
Se il problema in fisica non indica in quali unità dovrebbe essere data la risposta, deve essere data in unità del sistema SI o in quantità derivate corrispondenti alla quantità fisica che viene richiesta nel problema. Ad esempio, se l'attività richiede di trovare la velocità e non dice come dovrebbe essere espressa, la risposta deve essere data in m/s.
Per comodità, nei problemi di fisica è spesso necessario utilizzare prefissi sottomultipli (riducenti) e multipli (crescenti). possono essere applicati a qualsiasi quantità fisica. Ad esempio, mm è un millimetro, kt è un kiloton, ns è un nanosecondo, Mg è un megagrammo, mmol è un millimol, µA è un microampere. Ricorda che non ci sono doppi prefissi in fisica. Ad esempio, un microgrammo è un microgrammo, non un millichilogrammo. Si noti che quando si sommano e si sottraggono valori, è possibile operare solo con valori della stessa dimensione. Ad esempio, i chilogrammi possono essere aggiunti solo ai chilogrammi, i millimetri possono essere sottratti solo dai millimetri e così via. Quando si convertono i valori, utilizzare la tabella seguente.
Percorso e movimento
cinematica detto ramo della meccanica in cui si considera il movimento dei corpi senza chiarire le cause di questo movimento.
Movimento meccanico corpo è chiamato il cambiamento nella sua posizione nello spazio rispetto ad altri corpi nel tempo.
Ogni corpo ha una certa dimensione. Tuttavia, in molti problemi di meccanica non è necessario indicare le posizioni delle singole parti del corpo. Se le dimensioni del corpo sono piccole rispetto alle distanze di altri corpi, allora questo corpo può essere considerato punto materiale. Quindi, quando guidi un'auto su lunghe distanze, puoi trascurarne la lunghezza, poiché la lunghezza dell'auto è piccola rispetto alla distanza percorsa.
È intuitivamente chiaro che le caratteristiche del movimento (velocità, traiettoria, ecc.) dipendono da dove lo guardiamo. Pertanto, per descrivere il moto, viene introdotto il concetto di quadro di riferimento. Sistema di riferimento (CO)- un insieme di un corpo di riferimento (è considerato assolutamente solido), un sistema di coordinate ad esso collegato, un righello (un dispositivo che misura le distanze), un orologio e un sincronizzatore di tempo.
Muovendosi nel tempo da un punto all'altro, il corpo (punto materiale) descrive una certa linea nella data CO, che viene chiamata traiettoria del corpo.
Muovendo il corpo detto segmento diretto di una retta che collega la posizione iniziale del corpo con la sua posizione finale. Lo spostamento è una quantità vettoriale. Lo spostamento può aumentare, diminuire e diventare uguale a zero nel processo di movimento.
Passato sentieroè uguale alla lunghezza della traiettoria percorsa dal corpo in un certo tempo. Il percorso è un valore scalare. Il percorso non può essere ridotto. Il percorso aumenta o rimane costante (se il corpo non si muove). Quando un corpo si muove lungo una traiettoria curvilinea, il modulo (lunghezza) del vettore spostamento è sempre minore della distanza percorsa.
In uniforme(velocità costante) modo in movimento l può essere trovato usando la formula:
dove: v- la velocità del corpo, t- il tempo durante il quale si è spostato. Quando si risolvono problemi di cinematica, lo spostamento si trova solitamente in base a considerazioni geometriche. Spesso le considerazioni geometriche per trovare lo spostamento richiedono la conoscenza del teorema di Pitagora.
velocità media
Velocità- grandezza vettoriale che caratterizza la velocità di movimento del corpo nello spazio. La velocità è media e istantanea. La velocità istantanea descrive il movimento in un dato momento specifico in un dato punto specifico dello spazio e la velocità media caratterizza l'intero movimento nel suo insieme, in generale, senza descrivere i dettagli del movimento in ciascuna area specifica.
Velocità media di viaggioè il rapporto tra l'intero viaggio e il tempo di percorrenza totale:

dove: l pieno - l'intero percorso che il corpo ha percorso, t pieno - tutto il tempo di movimento.
Velocità media di viaggioè il rapporto tra lo spostamento totale e il tempo di percorrenza totale:

Questo valore è diretto allo stesso modo dello spostamento totale del corpo (cioè dal punto iniziale del movimento al punto finale). Allo stesso tempo, non dimenticare che lo spostamento totale non è sempre uguale alla somma algebrica degli spostamenti in determinati stadi del movimento. Il vettore di spostamento completo è uguale alla somma vettoriale degli spostamenti nelle singole fasi del movimento.
- Quando si risolvono problemi di cinematica, non commettere un errore molto comune. La velocità media, di regola, non è uguale alla media aritmetica delle velocità del corpo in ogni fase del movimento. La media aritmetica si ottiene solo in alcuni casi particolari.
- E ancor di più, la velocità media non è uguale ad una delle velocità con cui il corpo si muoveva nel processo di movimento, anche se tale velocità aveva un valore approssimativamente intermedio rispetto alle altre velocità con cui il corpo si muoveva.
Moto rettilineo uniformemente accelerato
Accelerazioneè una grandezza fisica vettoriale che determina la velocità di variazione della velocità del corpo. L'accelerazione di un corpo è il rapporto tra la variazione di velocità e il periodo di tempo durante il quale è avvenuta la variazione di velocità:
![]()
dove: v 0 è la velocità iniziale del corpo, vè la velocità finale del corpo (cioè dopo un periodo di tempo t).
Inoltre, se non diversamente specificato nella condizione del problema, assumiamo che se il corpo si muove con accelerazione, allora questa accelerazione rimane costante. Questo movimento del corpo è chiamato uniformemente accelerato(o ugualmente variabile). Con un movimento uniformemente accelerato, la velocità del corpo cambia della stessa quantità in intervalli di tempo uguali.
Il movimento uniformemente accelerato viene effettivamente accelerato quando il corpo aumenta la velocità di movimento e rallentato quando la velocità diminuisce. Per facilitare la risoluzione dei problemi, è conveniente prendere l'accelerazione con il segno "-" per il rallentatore.
Dalla formula precedente segue un'altra formula più comune, che descrive variazione di velocità nel tempo con moto uniformemente accelerato:
Sposta (ma non percorso) con moto uniformemente accelerato si calcola con le formule:

![]()
Nell'ultima formula viene utilizzata una caratteristica del moto uniformemente accelerato. Con moto uniformemente accelerato, la velocità media può essere calcolata come media aritmetica delle velocità iniziale e finale (questa proprietà è molto comoda da usare quando si risolvono alcuni problemi):
Con il calcolo del percorso è più difficile. Se il corpo non ha cambiato la direzione del movimento, con un movimento rettilineo uniformemente accelerato, il percorso è numericamente uguale allo spostamento. E se è cambiato, è necessario calcolare separatamente il percorso fino alla fermata (punto di svolta) e il percorso dopo la fermata (punto di svolta). E semplicemente sostituire il tempo nelle formule per muoversi in questo caso porterà a un errore tipico.
Coordinata con moto uniformemente accelerato, cambia secondo la legge:

Proiezione di velocità con moto uniformemente accelerato, cambia secondo la seguente legge:
![]()
Formule simili si ottengono per gli assi delle coordinate rimanenti.
Caduta libera in verticale
Tutti i corpi nel campo gravitazionale terrestre sono influenzati dalla gravità. In assenza di supporto o sospensione, questa forza fa cadere i corpi verso la superficie terrestre. Se trascuriamo la resistenza dell'aria, il movimento dei corpi solo sotto l'influenza della gravità viene chiamato caduta libera. La forza di gravità impartisce a qualsiasi corpo, indipendentemente dalla sua forma, massa e dimensione, la stessa accelerazione, chiamata accelerazione di caduta libera. Vicino alla superficie della terra accelerazione di gravitàè:
Ciò significa che la caduta libera di tutti i corpi vicino alla superficie terrestre è un moto uniformemente accelerato (ma non necessariamente rettilineo). Innanzitutto, considera il caso più semplice di caduta libera, quando il corpo si muove rigorosamente in verticale. Un tale movimento è un movimento rettilineo uniformemente accelerato, quindi tutti gli schemi e i trucchi di tale movimento studiati in precedenza sono adatti anche per la caduta libera. Solo l'accelerazione è sempre uguale all'accelerazione di caduta libera.
Tradizionalmente, in caduta libera, viene utilizzato un asse OY diretto verticalmente. Non c'è niente di terribile qui. Hai solo bisogno di tutte le formule invece dell'indice " X" scrivere " a". Si conserva il significato di questo indice e la regola per la definizione dei segni. Dove dirigere l'asse OY è la tua scelta, a seconda della comodità di risolvere il problema. Opzioni 2: su o giù.
Diamo alcune formule che sono la soluzione di alcuni problemi specifici della cinematica della caduta libera verticale. Ad esempio, la velocità alla quale cadrà un corpo che cade da un'altezza h senza velocità iniziale:
Tempo di caduta del corpo dall'alto h senza velocità iniziale:

L'altezza massima alla quale un corpo viene lanciato verticalmente verso l'alto con una velocità iniziale v 0 , il tempo necessario a questo corpo per raggiungere la sua altezza massima e il tempo di volo totale (fino al ritorno al punto di partenza):
Lancio orizzontale
Con un lancio orizzontale con una velocità iniziale v 0, è conveniente considerare il movimento del corpo come due movimenti: uniforme lungo l'asse OX (lungo l'asse OX non ci sono forze che impediscono o aiutano il movimento) e movimento uniformemente accelerato lungo l'asse OY.
La velocità in ogni momento è diretta tangenzialmente alla traiettoria. Può essere scomposto in due componenti: orizzontale e verticale. La componente orizzontale rimane sempre invariata ed è uguale a v x= v 0. E la verticale aumenta secondo le leggi del moto accelerato v y= gt. in cui velocità totale del corpo può essere trovato utilizzando le formule:
![]()
![]()
Allo stesso tempo, è importante capire che il tempo in cui il corpo cade a terra non dipende in alcun modo dalla velocità orizzontale con cui è stato lanciato, ma è determinato solo dall'altezza da cui il corpo è stato lanciato. Il tempo impiegato da un corpo per cadere a terra è dato da:

Mentre il corpo cade, si muove simultaneamente lungo l'asse orizzontale. Di conseguenza, distanza di volo del corpo oppure la distanza che il corpo può volare lungo l'asse x sarà uguale a:

Angolo tra orizzonte e la velocità del corpo può essere facilmente trovata dalla relazione:

Inoltre, a volte nei compiti possono chiedere del momento in cui la piena velocità del corpo sarà inclinata di un certo angolo per verticale. Allora questo angolo sarà dalla relazione:


È importante capire che tipo di angolo appare nel problema (con la verticale o con l'orizzontale). Questo ti aiuterà a scegliere la formula giusta. Se risolviamo questo problema con il metodo delle coordinate, la formula generale per la legge di variazione delle coordinate durante un moto uniformemente accelerato è:
![]()
Si trasforma nella seguente legge del moto lungo l'asse OY per un corpo lanciato orizzontalmente:
Con il suo aiuto, possiamo trovare l'altezza alla quale sarà il corpo in un dato momento. In questo caso, nel momento in cui il corpo cade a terra, la coordinata del corpo lungo l'asse OY sarà uguale a zero. È ovvio che il corpo si muove uniformemente lungo l'asse OX, quindi, nell'ambito del metodo delle coordinate, la coordinata orizzontale cambierà secondo la legge:
Lancia ad angolo rispetto all'orizzonte (da terra a terra)
Altezza di sollevamento massima quando si lancia ad angolo rispetto all'orizzonte (rispetto al livello iniziale):

Tempo per salire all'altezza massima quando si lancia ad angolo rispetto all'orizzonte:

Autonomia di volo e tempo di volo totale di un corpo lanciato ad angolo rispetto all'orizzonte (a condizione che il volo termini alla stessa altezza da cui è iniziato, cioè il corpo è stato lanciato, ad esempio, da terra a terra):

La velocità minima di un corpo lanciato ad angolo rispetto all'orizzonte è nel punto più alto dell'ascesa ed è pari a:
La velocità massima di un corpo lanciato ad angolo rispetto all'orizzonte è nei momenti di lancio e caduta a terra, ed è uguale a quella iniziale. Questa affermazione è vera solo per i tiri terra-terra. Se il corpo continua a volare al di sotto del livello da cui è stato lanciato, acquisirà sempre più velocità lì.
Aggiunta di velocità
Il movimento dei corpi può essere descritto in diversi quadri di riferimento. Dal punto di vista della cinematica, tutti i sistemi di riferimento sono uguali. Tuttavia, le caratteristiche cinematiche del movimento, come la traiettoria, lo spostamento, la velocità, risultano essere differenti nei diversi sistemi. I valori che dipendono dalla scelta del sistema di riferimento in cui vengono misurati sono detti relativi. Pertanto, il riposo e il movimento del corpo sono relativi.
Pertanto, la velocità assoluta di un corpo è uguale alla somma vettoriale della sua velocità relativa al sistema di coordinate mobili e alla velocità del sistema di riferimento mobile stesso. O, in altre parole, la velocità di un corpo in un sistema di riferimento fisso è uguale alla somma vettoriale della velocità del corpo in un sistema di riferimento mobile e della velocità del sistema in movimento rispetto a quello fisso.
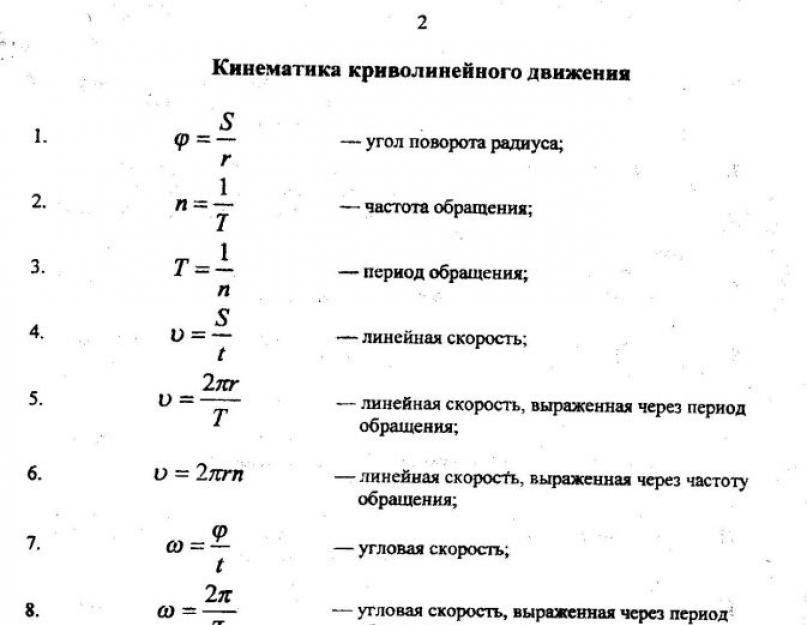
Moto circolare uniforme
Il moto di un corpo in una circonferenza è un caso speciale di moto curvilineo. Questo tipo di movimento è considerato anche in cinematica. Con il moto curvilineo, il vettore velocità del corpo è sempre diretto tangenzialmente alla traiettoria. La stessa cosa accade quando ci si muove in cerchio (vedi figura). Il moto uniforme di un corpo in una circonferenza è caratterizzato da un certo numero di grandezze.

Periodoè il tempo impiegato da un corpo per compiere un giro completo in un cerchio. L'unità di misura è 1 s. Il periodo si calcola con la formula:
Frequenza- il numero di giri che il corpo ha fatto, muovendosi in un cerchio, per unità di tempo. L'unità di misura è 1 rpm o 1 Hz. La frequenza si calcola con la formula:
In entrambe le formule: N- il numero di giri per volta t. Come si può vedere dalle formule precedenti, il periodo e la frequenza delle grandezze sono reciprocamente invertiti:
![]()
In velocità di rotazione uniforme il corpo sarà così definito:
![]()
dove: l- la circonferenza o il percorso percorso dal corpo in un tempo pari al periodo T. Quando un corpo si muove in una circonferenza, è conveniente considerare lo spostamento angolare φ (o angolo di rotazione), misurato in radianti. velocità angolare ω corpo in un dato punto è chiamato il rapporto del piccolo spostamento angolare Δ φ a un piccolo intervallo di tempo Δ t. Ovviamente per un tempo pari al periodo T il corpo supera un angolo pari a 2 π , quindi, con moto uniforme lungo una circonferenza, si soddisfano le formule:
![]()
La velocità angolare è misurata in rad/s. Ricorda di convertire gli angoli da gradi a radianti. Lunghezza dell'arco lè correlato all'angolo di rotazione dalla relazione:
Comunicazione tra Line Rate Module v e velocità angolare ω :
![]()
Quando un corpo si muove in una circonferenza con una velocità modulo costante, cambia solo la direzione del vettore velocità, quindi il movimento di un corpo in una circonferenza con una velocità modulo costante è un movimento con accelerazione (ma non uniformemente accelerato), poiché il la direzione della velocità cambia. In questo caso, l'accelerazione è diretta lungo il raggio verso il centro del cerchio. Si chiama normale, o accelerazione centripeta, poiché il vettore di accelerazione in qualsiasi punto del cerchio è diretto verso il suo centro (vedi figura).

Modulo di accelerazione centripeta associato a lineare v su questo sito. Per fare questo, non è necessario nulla, ovvero: dedicare dalle tre alle quattro ore al giorno alla preparazione per la TC in fisica e matematica, allo studio della teoria e alla risoluzione dei problemi. Il fatto è che il DT è un esame in cui non basta solo conoscere la fisica o la matematica, bisogna anche essere in grado di risolvere velocemente e senza fallimenti un gran numero di problemi su vari argomenti e di varia complessità. Quest'ultimo può essere appreso solo risolvendo migliaia di problemi.
Il corretto, diligente e responsabile adempimento di questi tre punti, nonché lo studio responsabile delle prove formative finali, ti permetteranno di mostrare un ottimo risultato sulla TC, il massimo di ciò di cui sei capace.
Trovato un errore?
Se pensi di aver trovato un errore in materiali didattici, quindi scrivi a riguardo via e-mail (). Nella lettera indica la materia (fisica o matematica), il nome o il numero dell'argomento o della prova, il numero del compito, o la posizione nel testo (pagina) dove, secondo te, c'è un errore. Descrivi anche qual è il presunto errore. La tua lettera non passerà inosservata, l'errore verrà corretto o ti verrà spiegato perché non è un errore.
Per capire cosa studia la meccanica, è necessario considerare cosa significhi moto in senso più generale. Il significato di questa parola implica un cambiamento in qualcosa. Ad esempio, un movimento politico sostiene l'uguaglianza di diversi segmenti della popolazione, indipendentemente dalla loro razza. In precedenza non esisteva, poi qualcosa è cambiato e ora ogni persona ha gli stessi diritti. Questo è il movimento della civiltà in avanti. Un altro esempio è quello ambientale. In passato, essendo uscito nella natura, nessuno pensava a ciò che la spazzatura lascia dietro di sé. Oggi, qualsiasi persona civile lo raccoglierà e lo porterà in un luogo appositamente designato per un ulteriore smaltimento.
Qualcosa di simile può essere osservato in meccanica. Con il movimento meccanico, la posizione del corpo nello spazio rispetto ad altri oggetti cambia nel tempo. Il compito principale dei meccanici è indicare in qualsiasi momento dove si trova l'oggetto, anche tenendo conto di quello che non è ancora arrivato. Cioè, per prevedere la posizione del corpo in un dato momento e non solo per scoprire esattamente dove si trovava nello spazio in passato.
La cinematica è una branca della meccanica che studia il movimento di un corpo senza analizzarne le cause. Ciò significa che insegna a non spiegare, ma a descrivere. Cioè, trovare un modo per stabilire la posizione del corpo in qualsiasi momento. I concetti di base della cinematica includono velocità, accelerazione, distanza, tempo e spostamento.
Difficoltà a descrivere il movimento
Il primo problema che deve affrontare la cinematica è che ogni corpo ha una certa dimensione. Supponiamo che sia necessario descrivere il movimento di un oggetto. Ciò significa imparare a designare la sua posizione in un dato momento. Ma ogni oggetto occupa un certo posto nello spazio. Cioè, tutte le parti di questo oggetto occupano una posizione diversa allo stesso tempo.

In questo caso, quale punto dovrebbe essere preso per descrivere la posizione dell'intero oggetto? Se prendi in considerazione ciascuno, i calcoli saranno troppo complicati. Pertanto, la risposta a questa domanda può essere semplificata il più possibile. Se tutti i punti di un corpo si muovono nella stessa direzione, allora uno di questi punti, che questo corpo contiene, è sufficiente per descrivere il movimento.
Tipi di moto in cinematica
Ci sono tre tipi:
- Traslazionale è un movimento in cui qualsiasi linea retta tracciata nel corpo rimane parallela a se stessa. Ad esempio, un'auto che si muove su un'autostrada fa questo tipo di movimento.
- La rotazione è il movimento di un corpo in cui tutti i suoi punti si muovono in cerchi con centri giacenti su una linea retta, chiamata asse di rotazione. Ad esempio, la rotazione della Terra attorno al suo asse.
- Un movimento oscillatorio è un movimento in cui il corpo ripete la sua traiettoria dopo un certo periodo di tempo. Ad esempio, il movimento di un pendolo.
Concetti di base della cinematica - punto materiale
Qualsiasi movimento complesso può essere descritto come una combinazione di due tipi semplici: traslazionale e rotazionale. Ad esempio, la ruota di un'auto o un tettuccio in piedi su una pedana mobile rettilinea partecipano contemporaneamente a questi due tipi di movimento.

Ma cosa succede se il movimento del corpo non può essere rappresentato come una combinazione? Ad esempio, se un'auto sta guidando su una strada dissestata, la sua posizione cambierà in modo molto complesso. Se contiamo solo che questo trasporto si sposta da una città all'altra, allora in una situazione del genere non importa di quale dimensione il corpo si muova dal punto A al punto B e può essere trascurato. In questo caso, è importante solo per quanto tempo l'auto ha percorso una certa distanza e a quale velocità si stava muovendo.
Tuttavia, va tenuto presente che trascurare le dimensioni non è consentito in ogni problema. Ad esempio, se si calcola il movimento durante il parcheggio di un'auto, ignorare le dimensioni di un determinato corpo comporterà un effetto dannoso. Pertanto, solo in quelle situazioni in cui, nell'ambito di un compito specifico, le dimensioni di un oggetto in movimento possono essere trascurate, un tale corpo viene solitamente chiamato punto materiale.
Formule cinematiche
I numeri con cui viene specificata la posizione di un punto nello spazio sono chiamati coordinate. Per definirlo in linea retta basta un numero; quando viene in superficie, poi due, circa lo spazio: tre. Non sono richiesti più numeri nel mondo tridimensionale (per descrivere la posizione di un punto materiale).

Ci sono tre equazioni di base per il concetto di cinematica, come sezione sul movimento dei corpi:
- v = u + a.
- S = ut + 1/2at 2 .
- v 2 = u 2 + 2as.
v = velocità finale,
u = velocità iniziale,
a = accelerazione,
s = distanza percorsa dal corpo,
Formule cinematiche nello spazio unidimensionale:
X - X o = Vo t + 1/2a t2
V 2 \u003d V o 1 + 2a (X - X o)
X - X o \u003d 1 \ 2 (V o + V) t
Dove,
V - velocità finale (m / s),
V o - velocità iniziale (m / s),
a - accelerazione (m / s 2),
t - tempo (i),
X - posizione finale (m),
Formule di cinematica nello spazio bidimensionale
Poiché le seguenti equazioni vengono utilizzate per descrivere un punto materiale su un piano, vale la pena considerare gli assi X e Y.
Data la direzione X:
un x = costante
V fx = V io x + a x Δt
X f = X io + V io x Δt +1/2a x Δt 2
Δt \u003d V fx -V ix /a x
V fx 2 = V ix 2 + 2ax Δx
X f \u003d X i + 1/2 (V fx + V ix) Δ t.
E data la direzione y:
ay = costante
V fy = V iy + a y Δt
y f = y io + V iy Δt + 1/2 a x Δt 2
Δt = Vfy - V iy /a y
V fy 2 = V iy 2 + 2 ay Δ y
y f = y io +1/2 (V fy + V iy) Δt.
V f - velocità finale (m / s),
V i - velocità iniziale (m / s),
a - accelerazione (m / s 2),
t - tempo (i),
X - posizione finale (m),
X 0 - posizione iniziale (m).
Il movimento di un proiettile lanciato è il miglior esempio per descrivere il movimento di un oggetto in due dimensioni. Qui il corpo si muove sia in posizione verticale Y che in posizione orizzontale X, quindi possiamo dire che l'oggetto ha due velocità.
Esempi di compiti in cinematica
Compito 1: La velocità iniziale del carrello è zero. Inizialmente, questo oggetto è a riposo. Un'accelerazione uniforme inizia ad agire su di esso durante un intervallo di tempo di 5,21 secondi. La distanza percorsa dal camion è di 110 m Trova l'accelerazione.
Soluzione:
Distanza percorsa s = 110 m,
velocità iniziale v i = 0,
tempo t = 5,21 s,
accelerazione a=?
Utilizzando i concetti e le formule di base della cinematica, possiamo concludere che,
s \u003d v io t + 1/2 a t 2,
110 m = (0) × (5.21) + 1/2 × a (5.21) 2 ,
a \u003d 8,10 m / s 2.
Compito 2: Il punto si muove lungo l'asse x (in cm), dopo t secondi di viaggio può essere rappresentato usando l'equazione x = 14t 2 - t + 10. Occorre trovare la velocità media del punto, a patto che t = 3s ?
Soluzione:
La posizione del punto in t = 0 è x = 10 cm.
A t = 3s, x = 133 cm.
Velocità media, V av = Δx/Δt = 133-10/3-0 = 41 cm/s.
Qual è l'organismo di riferimento
Si può parlare di movimento solo se c'è qualcosa rispetto al quale si considera un cambiamento nella posizione dell'oggetto in studio. Un tale oggetto è chiamato corpo di riferimento ed è condizionatamente sempre considerato immobile.
Se l'attività non indica in quale sistema di segnalazione si sposta il punto materiale, l'organismo di riferimento è considerato la terra per impostazione predefinita. Tuttavia, ciò non significa che nessun altro conveniente per il calcolo non possa essere preso come oggetto immobile in un dato momento, rispetto al quale si compie il movimento. Ad esempio, un treno in movimento che fa girare un'auto può essere preso come corpo di riferimento e così via.
Sistema di riferimento e suo significato in cinematica
Sono necessarie tre componenti per descrivere il movimento:
- Sistema di coordinate.
- Conte corpo.
- Un dispositivo per misurare il tempo.

Il corpo di riferimento, il sistema di coordinate ad esso associato e il dispositivo per la misurazione del tempo costituiscono il sistema di riferimento. Non ha senso parlare di movimento se non è indicato. Un sistema di riferimento opportunamente scelto permette di semplificare la descrizione del movimento e, al contrario, di complicarla se viene scelto senza successo.
È per questo motivo che l'umanità crede da tempo che il Sole si muova intorno alla Terra e che sia al centro dell'universo. Un movimento così complesso dei luminari, dovuto al fatto che gli osservatori terreni si trovano in un quadro di riferimento che si muove in modo molto intricato. La terra ruota attorno al suo asse e contemporaneamente attorno al sole. Infatti, se si cambia il sistema di riferimento, tutti i movimenti dei corpi celesti sono facilmente descritti. Questo è stato fatto una volta da Copernico. Ha offerto la sua descrizione dell'ordine mondiale in cui il Sole è immobile. Rispetto ad esso, è molto più facile descrivere il moto dei pianeti che se il corpo di riferimento fosse la Terra.

Concetti di base della cinematica - traiettoria e traiettoria
Lascia che un punto sia dapprima nella posizione A, dopo qualche tempo era nella posizione B. Si può tracciare una linea tra di loro. Ma affinché questa linea retta porti più informazioni sul movimento, cioè fosse chiaro da dove e da dove si muoveva il corpo, non dovrebbe essere solo un segmento, ma un segmento diretto, solitamente indicato dalla lettera S. Il movimento del corpo è un vettore disegnato dalla posizione iniziale dell'oggetto a quella finale.

Se il corpo era originariamente nel punto A, e poi è finito nel punto B, ciò non significa che si sia mosso solo in linea retta. Ci sono un numero infinito di modi per passare da una posizione all'altra. La linea lungo la quale si muove il corpo è un altro concetto base della cinematica: la traiettoria. E la sua lunghezza è chiamata percorso, che di solito è indicato dalle lettere L o l.
Definizione 1
Cinematica- questa è una branca della meccanica che considera il movimento dei corpi senza spiegare le cause che lo causano.
Definizione 2
Movimento meccanico del corpoè un cambiamento nella posizione di un dato corpo nello spazio rispetto ad altri corpi nel tempo.
Come abbiamo detto, il moto meccanico di un corpo è relativo. Il movimento di uno stesso corpo rispetto a corpi diversi può essere diverso.
Definizione 3
Per caratterizzare il movimento di un corpo, viene indicato in relazione a quale dei corpi viene considerato questo movimento. Questo sarà organismo di riferimento.
Definizione 4
Sistema di riferimento− sistema di coordinate, a cui è associato il corpo di riferimento e il tempo di riferimento. Consente di determinare in qualsiasi momento la posizione di un corpo in movimento.
In C I, l'unità di lunghezza è il metro e l'unità di tempo è la seconda.
Ogni corpo ha una certa dimensione. Diverse parti del corpo si trovano in diverse posizioni spaziali. Ma nella maggior parte dei problemi di meccanica non è necessario indicare la posizione delle singole parti del corpo. Se le dimensioni del corpo sono piccole rispetto alle distanze di altri corpi, allora il corpo dato è considerato il suo punto materiale. È così che si procede quando si studia il movimento dei pianeti intorno al Sole.
Definizione 5
Si chiama movimento meccanico progressivo, se tutte le parti del corpo si muovono allo stesso modo.
Esempio 1
Il movimento traslatorio si osserva vicino alle cabine nell'attrazione della ruota panoramica o vicino all'auto su un tratto rettilineo del binario.
Nel moto traslatorio del corpo è anche considerato un punto materiale.
Definizione 6
Punto materialeè un corpo le cui dimensioni in determinate condizioni possono essere trascurate.
Il termine "punto materiale" è importante in meccanica.
Definizione 7
traiettoria del corpo− qualche linea, che un corpo o un punto materiale descrive, muovendosi nel tempo da un punto all'altro.
La posizione di un punto materiale nello spazio in qualsiasi intervallo di tempo (la legge del moto) è determinata utilizzando la dipendenza dal tempo delle coordinate x = x (t) , y = y (t) , z = z (t) o il tempo dipendenza del vettore raggio r → = r → (t) tracciato dall'origine al punto dato. Questo è chiaramente mostrato nella Figura 1. uno . uno .
Immagine 1 . 1 . 1 . Determinare la posizione di un punto utilizzando le coordinate x = x (t) , y = y (t) e z = z (t) e il vettore raggio r → (t) , r 0 →è il vettore raggio della posizione del punto nell'istante iniziale.
Definizione 8
movimento del corpos → = ∆ r → = r → - r 0 →- questo è un segmento di linea retta diretto che collega la posizione iniziale del corpo con la sua ulteriore posizione. Lo spostamento è una quantità vettoriale.
La distanza percorsa l è uguale alla lunghezza dell'arco della traiettoria percorsa dal corpo in un certo tempo t. Il percorso è un valore scalare.
Se si considera il movimento del corpo per un periodo di tempo abbastanza breve, il vettore di spostamento risulta essere diretto tangenzialmente alla traiettoria in un dato punto e la sua lunghezza è uguale alla distanza percorsa.
Nel caso di un piccolo intervallo di tempo Δ t, il percorso Δ l superato dal corpo coincide praticamente con il modulo del vettore spostamento ∆ s → . Quando si sposta un corpo lungo una traiettoria curvilinea, il modulo del vettore di movimento è sempre inferiore alla distanza percorsa (Figura 1.1.2).

Immagine 1 . uno . 2. Distanza percorsa l e vettore di spostamento∆s → durante il movimento curvilineo del corpo.
aeb sono i punti di inizio e fine del percorso.
Per descrivere il moto in fisica, viene introdotto il concetto di velocità media: υ → = ∆ s → ∆ t = ∆ r → ∆ t .
I fisici sono più interessati alla formula non per la media, ma per la velocità istantanea, che viene calcolata come il limite a cui tende la velocità media in un intervallo di tempo infinitesimo Δ t, ovvero υ → = ∆ s → ∆ t = ∆ r → ∆ t; ∆t → 0 .
In matematica, questo limite è chiamato derivata ed è indicato con d r → d t o r → ˙.
La velocità istantanea υ → del corpo in ogni punto della traiettoria curvilinea è diretta tangenzialmente alla traiettoria in un dato punto. La figura 1 mostra la differenza tra velocità media e istantanea. uno . 3.

Immagine 1 . 1 . 3 . Velocità medie e istantanee. ∆s 1 → , ∆s 2 → , ∆s 3 →- movimento nel tempo∆t1< ∆ t 2 < ∆ t 3 rispettivamente. Int → 0 , υ → c p → υ → .
Quando si sposta un corpo lungo una traiettoria curvilinea, la velocità υ → cambia in valore assoluto e in direzione. La variazione del vettore di velocità υ → per un breve periodo di tempo Δ t viene impostata utilizzando il vettore Δ υ → (Figura 1 . 1 . 4).
Il vettore di variazione della velocità ∆ υ → = υ 2 → - υ 1 → per un breve periodo di tempo Δ t è scomposto in 2 componenti: ∆ υ r → , che è diretto lungo il vettore υ → (componente tangenziale) e ∆ υ n → , che è diretto perpendicolarmente al vettore υ → (componente normale).

Immagine 1 . uno . quattro . Modifica del vettore velocità in magnitudine e direzione.∆υ → = ∆υ → r + ∆υ → n - variazione del vettore velocità nell'arco di tempo Δ t .
Definizione 9
accelerazione istantanea del corpo a → è il limite del rapporto tra una piccola variazione di velocità ∆ υ → e un breve periodo di tempo Δ t , durante il quale la velocità è cambiata: a → = ∆ υ → ∆ t = ∆ υ → τ ∆ t + ∆ υ → n ∆ t ; (∆t → 0) .
La direzione del vettore di accelerazione a → , nel moto curvilineo, non coincide con la direzione del vettore di velocità υ → . Le componenti del vettore di accelerazione a → sono tangenti (tangenziali) a → τ e normali a → n accelerazioni (Figura 1 . 1 . 5).

Immagine 1 . 1 . 5 . Accelerazione tangente e normale.
L'accelerazione tangenziale mostra quanto velocemente cambia la velocità del corpo modulo: a τ = ∆ υ ∆ t ; ∆t → 0 .
Il vettore a → τ è diretto tangenzialmente alla traiettoria.
L'accelerazione normale misura la velocità con cui la velocità di un oggetto cambia direzione.
Esempio 2
Immaginiamo un movimento curvilineo come movimento lungo archi di cerchio (Figura 1.1.6).

Immagine 1 . uno . 6. Movimento lungo archi di cerchio.
L'accelerazione normale dipende dal modulo di velocità υ e dal raggio R del cerchio lungo l'arco di cui il corpo si muove in un determinato momento: a n = υ 2 R .
Il vettore a n → è sempre diretto verso il centro della circonferenza.
Secondo la figura 1. uno . 5 si può vedere che il modulo di accelerazione totale è uguale a a = a τ 2 + a n 2 .
Quindi, le principali grandezze fisiche nella cinematica di un punto materiale sono la distanza percorsa l , lo spostamento s → , la velocità υ → e l'accelerazione a → .
Il percorso l è un valore scalare.
Lo spostamento s → , la velocità υ → e l'accelerazione a → sono grandezze vettoriali.
Per impostare una qualsiasi grandezza vettoriale, è necessario impostarne il modulo e determinarne la direzione. I vettori obbediscono a regole matematiche: possono essere proiettati sugli assi delle coordinate, sommati, sottratti, ecc.
Se noti un errore nel testo, evidenzialo e premi Ctrl+Invio
Innanzitutto, va notato che stiamo parlando di un punto geometrico, cioè una regione di spazio che non ha dimensioni. È per questa immagine astratta (modello) che valgono tutte le definizioni e le formule presentate di seguito. Tuttavia, per brevità, farò spesso riferimento alla mozione corpo, oggetto o particelle. Lo faccio solo per renderti più facile la lettura. Ma ricorda sempre che stiamo parlando di un punto geometrico.
vettore di raggio punti è un vettore il cui inizio coincide con l'origine del sistema di coordinate e la cui fine coincide con il punto dato. Il vettore raggio è solitamente indicato dalla lettera r. Sfortunatamente, alcuni autori lo chiamano S. Consiglio vivamente non usare designazione S per il vettore raggio. Il fatto è che la stragrande maggioranza degli autori (sia nazionali che stranieri) usa la lettera s per denotare un percorso, che è uno scalare e, di regola, non ha nulla a che fare con il vettore del raggio. Se indichi il vettore raggio come S puoi facilmente confonderti. Ancora una volta, siamo come tutti gli altri gente normale, useremo la seguente notazione: rè il vettore raggio del punto, s è il percorso percorso dal punto.
vettore di spostamento(spesso basta dire - in movimento) - questo è vettore, il cui inizio coincide con il punto della traiettoria in cui si trovava il corpo quando abbiamo iniziato a studiare questo movimento, e la fine di questo vettore coincide con il punto della traiettoria in cui abbiamo terminato questo studio. Indicheremo questo vettore come Δ r. L'uso del simbolo Δ è ovvio: Δ rè la differenza tra il vettore raggio r il punto finale del segmento studiato della traiettoria e il vettore del raggio r 0 punto dell'inizio di questo segmento (Fig. 1), ovvero Δ r= r − r 0 .

Traiettoriaè la linea lungo la quale si muove il corpo.
Sentiero- è la somma delle lunghezze di tutti i tratti della traiettoria percorsa successivamente dal corpo durante il movimento. Si indica o ∆S, se stiamo parlando di una sezione della traiettoria, oppure S, se stiamo parlando dell'intera traiettoria del movimento osservato. A volte (raramente) il percorso è indicato anche da un'altra lettera, ad esempio L (basta non denotarlo come r, ne abbiamo già parlato). Ricorda! Il percorso è scalare positivo! Il percorso nel processo di movimento può solo aumentare.
Velocità media di viaggio v mer
v cfr = ∆ r/Δt.
Velocità di movimento istantanea vè il vettore definito dall'espressione
v=d r/dt.
Velocità media di viaggio v cp è lo scalare definito dall'espressione
Vav = ∆s/∆t.
Vengono spesso utilizzate altre notazioni, ad esempio
Velocità di marcia istantanea v è lo scalare definito dall'espressione
Il modulo della velocità istantanea di movimento e la velocità istantanea del percorso sono gli stessi, poiché dr = ds.
Accelerazione media un
un cfr = ∆ v/Δt.
Potenziamento istantaneo(o semplicemente, accelerazione) unè il vettore definito dall'espressione
un=d v/dt.
Accelerazione tangenziale (tangenziale) aτ (il pedice è la lettera minuscola greca tau) è vettore, che è proiezione vettoriale accelerazione istantanea sull'asse tangenziale.
Accelerazione normale (centrica) a n è vettore, che è proiezione vettoriale accelerazione istantanea sull'asse normale.
Modulo di accelerazione tangenziale
| unτ | = dv/dt,
Cioè è la derivata del modulo della velocità istantanea rispetto al tempo.
Modulo di accelerazione normale
| un n | = v 2 /r,
Dove r è il valore del raggio di curvatura della traiettoria nel punto in cui si trova il corpo.
Importante! Vorrei attirare la vostra attenzione su quanto segue. Non confondere con la notazione relativa alle accelerazioni tangenziali e normali! Il fatto è che nella letteratura su questo argomento c'è tradizionalmente un salto di qualità completo.
Ricorda!
un lo è vettore accelerazione tangenziale,
un n è vettore normale accelerazione.
unτ e un n sono vettore proiezioni di piena accelerazione un rispettivamente sull'asse tangente e sull'asse normale
A τ è la proiezione (scalare!) dell'accelerazione tangenziale sull'asse tangenziale,
A n è la proiezione (scalare!) dell'accelerazione normale sull'asse normale,
| unτ | è modulo vettore accelerazione tangenziale,
| un n | - questo è modulo vettore normale accelerazione.
Soprattutto non stupitevi se, leggendo nella letteratura sul moto curvilineo (in particolare rotatorio), scoprite che l'autore intende un τ come un vettore, e la sua proiezione, e il suo modulo. Lo stesso vale per un n. Tutto, come si suol dire, "in una bottiglia". E, purtroppo, questo è troppo spesso il caso. Anche libri di testo per Scuola superiore non fanno eccezione, in molti di loro (credetemi, nella maggior parte!) c'è una completa confusione su questo.
Quindi, senza conoscere le basi dell'algebra vettoriale o trascurarle, è molto facile confondersi completamente quando si studiano e si analizzano i processi fisici. Pertanto, la conoscenza dell'algebra vettoriale è la condizione più importante per il successo nello studio della meccanica. E non solo meccanica. In futuro, quando studierai altre branche della fisica, ne sarai ripetutamente convinto.
Velocità angolare istantanea(o semplicemente, velocità angolare) ω è il vettore definito dall'espressione
ω =d φ /dt,
Dove d φ - una variazione infinitesimale della coordinata angolare (d φ - vettore!).
Accelerazione angolare istantanea(o semplicemente, accelerazione angolare) ε è il vettore definito dall'espressione
ε =d ω /dt.
Connessione fra v, ω e r:
v = ω × r.
Connessione tra v, ω e r:
Connessione tra | unτ |, ε e r:
| unτ | = εr.
Ora passiamo a equazioni cinematiche specifici tipi di movimento. Queste equazioni devono essere apprese a memoria.
Equazione cinematica del moto uniforme e rettilineo sembra:
r = r 0 + v t,
Dove rè il vettore raggio dell'oggetto al tempo t, r 0 - lo stesso all'istante iniziale t 0 (all'inizio delle osservazioni).
Equazione cinematica del moto con accelerazione costante sembra:
r = r 0 + v 0 t + un t 2 /2, dove v 0 la velocità dell'oggetto al momento t 0 .
L'equazione per la velocità di un corpo quando si muove con accelerazione costante sembra:
v = v 0 + un t.
Equazione cinematica del moto circolare uniforme in coordinate polari sembra:
φ = φ 0 + ω z t,
Dove φ è la coordinata angolare del corpo in un dato momento, φ 0 è la coordinata angolare del corpo al momento dell'inizio dell'osservazione (all'istante iniziale), ω z è la proiezione della velocità angolare ω sull'asse Z (solitamente questo asse viene scelto perpendicolarmente al piano di rotazione).
Equazione cinematica del moto circolare con accelerazione costante in coordinate polari sembra:
φ = φ 0 + ω 0z t + ε z t 2 /2.
Equazione cinematica vibrazioni armoniche lungo l'asse x sembra:
X \u003d A Cos (ω t + φ 0),
Dove A è l'ampiezza delle oscillazioni, ω è la frequenza ciclica, φ 0 è la fase iniziale delle oscillazioni.
La proiezione della velocità di un punto oscillante lungo l'asse X su questo asseè uguale a:
V x = − ω UN Peccato (ω t + φ 0).
La proiezione dell'accelerazione di un punto oscillante lungo l'asse X su questo asseè uguale a:
A x \u003d - ω 2 A Cos (ω t + φ 0).
Connessione tra la frequenza ciclica ω, la frequenza ordinaria ƒ e il periodo di oscillazione T:
ω \u003d 2 πƒ \u003d 2 π / T (π \u003d 3,14 - il numero di pi).
Pendolo matematico ha un periodo di oscillazione T, determinato dall'espressione:
Al numeratore dell'espressione radicale è la lunghezza del filo del pendolo, al denominatore è l'accelerazione di caduta libera
Connessione tra assoluto v addominali, parente v rel e figurato v velocità di corsia:
v addominali = v rel + v per.
Ecco, forse, tutte le definizioni e le formule che possono essere necessarie quando si risolvono problemi di cinematica. Le informazioni fornite sono solo di riferimento e non possono sostituire un e-book in cui la teoria di questa sezione della meccanica è presentata in modo accessibile, dettagliato e, spero, affascinante.



