В данном разделе продолжим изучение темы уравнения прямой в пространстве с позиции стереометрии. Это значит, что мы будем рассматривать прямую линию в трехмерном пространстве как линию пересечения двух плоскостей.
Согласно аксиомам стереометрии, если две плоскости не совпадают и имеют одну общую точку, то они также имею одну общую прямую, на которой лежат все точки, которые являются общими для двух плоскостей. Используя уравнения двух пересекающихся плоскостей, мы можем определить прямую линию в прямоугольной системе координат.
По ходу рассмотрения темы приведем многочисленные примеры, ряд графических иллюстраций и развернутых решений, необходимых для лучшего усвоения материала.
Пусть даны две плоскости, которые не совпадают между собой и пересекаются. Обозначим их как плоскость α и плоскость β . Разместим их в прямоугольной системе координат O х у z трехмерного пространства.
Как мы помним, любую плоскость в прямоугольной системе координат задает общее уравнение плоскости вида A x + B y + C z + D = 0 . Будем считать, что плоскости α соотвествует уравнение A 1 x + B 1 y + C 1 z + D 1 = 0 , а плоскости β уравнение A 2 x + B 2 y + C 2 z + D 2 = 0 . В этом случае нормальные вектора плоскостей α и β n 1 → = (A 1 , B 1 , C 1) и n 2 → = (A 2 , B 2 , C 2) не коллинеарны, так как плоскости не совпадают между собой и е размещаются параллельно друг другу. Запишем это условие следующим образом:
n 1 → ≠ λ · n 2 → ⇔ A 1 , B 1 , C 1 ≠ λ · A 2 , λ · B 2 , λ · C 2 , λ ∈ R
Чтобы освежить в памяти материал по теме «Параллельность плоскостей», смотрите соответствующий раздел нашего сайта.
Линию пересечения плоскостей обозначим буквой a . Т.е. a = α ∩ β . Эта прямая представляет собой множество точек, которые являются общими для обеих плоскостей α и β . Это значит, что все точки прямой линии a удовлетворяют обоим уравнениям плоскости A 1 x + B 1 y + C 1 z + D 1 = 0 и A 2 x + B 2 y + C 2 z + D 2 = 0 . Фактически, они являются частным решением системы уравнений A 1 x + B 1 y + C 1 z + D 1 = 0 A 2 x + B 2 y + C 2 z + D 2 = 0 .
Общее решение системы линейных уравнений A 1 x + B 1 y + C 1 z + D 1 = 0 A 2 x + B 2 y + C 2 z + D 2 = 0 определяет координаты всех точек линии, по которой происходит пересечение двух плоскостей α и β . Это значит, что с его помощью мы можем определить положение прямой в прямоугольной системе координат O x y z .
Рассмотрим описанную теорию еще раз, теперь уже на конкретном примере.
Пример 1
Прямая O x – это прямая, по которой пересекаются координатные плоскости O x y и O x z . Зададим плоскость O x y уравнением z = 0 , а плоскость O x z уравнением у = 0 . Такой подход мы подробно разобрали в разделе «Неполное общее уравнение плоскости», так что, в случае затруднений, можно обратиться к этому материалу повторно. В этом случае координатная прямая O x определяется в трехмерной системе координат системой из двух уравнений вида y = 0 z = 0 .
Нахождение координат точки, лежащей на прямой, по которой пересекаются плоскости
Рассмотрим задачу. Пусть в трехмерном пространстве задана прямоугольная система координат O х у z . Линия, по которой пересекаются две плоскости a , задана системой уравнений A 1 x + B 1 y + C 1 z + D 1 = 0 A 2 x + B 2 y + C 2 z + D 2 = 0 . Дана точка трехмерного пространства M 0 x 0 , y 0 , z 0 .
Давайте определим, принадлежит ли точка M 0 x 0 , y 0 , z 0 заданной прямой линии a .
Для того, чтобы получить ответ на вопрос задачи, подставим координаты точки М 0 в каждое из двух уравнений плоскости. Если в результате подстановки оба уравнения превратятся в верные равенства A 1 x 0 + B 1 y 0 + C 1 z 0 + D 1 = 0 и A 2 x 0 + B 2 y 0 + C 2 z 0 + D 2 = 0 , то точка М 0 принадлежит каждой из плоскостей и принадлежит заданной линии. Если хотя бы одно из равенств A 1 x 0 + B 1 y 0 + C 1 z 0 + D 1 = 0 и A 2 x 0 + B 2 y 0 + C 2 z 0 + D 2 = 0 окажется неверным, то точка М 0 не принадлежит прямой линии.
Рассмотрим решение примера
Пример 2
Прямая линия задана в пространстве уравнениями двух пересекающихся плоскостей вида 2 x + 3 y + 1 = 0 x - 2 y + z - 3 = 0 . Определите, принадлежат ли точки M 0 (1 , - 1 , 0) и N 0 (0 , - 1 3 , 1) прямой линии пересечения плоскостей.
Решение
Начнем с точки М 0 . Подставим ее координаты в оба уравнения системы 2 · 1 + 3 · (- 1) + 1 = 0 1 - 2 · (- 1) + 0 - 3 = 0 ⇔ 0 = 0 0 = 0 .
В результате подстановки мы получили верные равенства. Это значит, что точка М 0 принадлежит обеим плоскостям и расположена на линии их пересечения.
Подставим в оба уравнения плоскости координаты точки N 0 (0 , - 1 3 , 1) . Получаем 2 · 0 + 3 · - 1 3 + 1 = 0 0 - 2 · - 1 3 + 1 - 3 = 0 ⇔ 0 = 0 - 1 1 3 = 0 .
Как вы видите, второе уравнение системы превратилось в неверное равенство. Это значит, что точка N 0 не принадлежит заданной прямой.
Ответ: точка М 0 принадлежит прямой линии, а точка N 0 не принадлежит.
Теперь предлагаем вам алгоритм нахождения координат некоторой точки, принадлежащей прямой линии, если прямая в пространстве в прямоугольной системе координат O x y z определяется уравнениями пересекающихся плоскостей A 1 x + B 1 y + C 1 z + D 1 = 0 A 2 x + B 2 y + C 2 z + D 2 = 0 .
Количество решений системы из двух линейных уравнений с темя неизвестными A 1 x + B 1 y + C 1 z + D 1 = 0 A 2 x + B 2 y + C 2 z + D 2 = 0 бесконечно. Любое из этих решений может стать решением задачи.
Приведем пример.
Пример 3
Пусть в трехмерном пространстве задана прямая линия уравнениями двух пересекающихся плоскостей вида x + 3 z + 7 = 0 2 x + 3 y + 3 z + 2 = 0 . Найдите координаты любой из точек этой прямой.
Решение
Перепишем систему уравнений x + 3 z + 7 = 0 2 x + 3 y + 3 z + 2 = 0 ⇔ x + 0 y + 3 z = - 7 2 x + 3 y + 3 z = - 2 .
Возьмем отличный от нуля минор второго порядка в качестве базисного минора основной матрицы системы 1 0 2 3 = 3 ≠ 0 . Это значит, что z – это свободная неизвестная переменная.
Перенесем слагаемые, содержащие свободную неизвестную переменную z в правые части уравнений:
x + 0 y + 3 z = - 7 2 x + 3 y + 3 z = - 2 ⇔ x + 0 y = - 7 - 3 z 2 x + 3 y = - 2 - 3 z
Введем произвольное действительное число λ и примем, что z = λ .
Тогда x + 0 y = - 7 - 3 z 2 x + 3 y = - 2 - 3 z ⇔ x + 0 y = - 7 - 3 λ 2 x + 3 y = - 2 - 3 λ .
Для решения полученной системы уравнений применим метод Крамера:
∆ = 1 0 2 3 = 1 · 3 - 0 · 1 = 2 ∆ x = - 7 - 3 λ 0 - - 3 λ 3 = - 7 - 3 λ · 3 - 0 · (- 2 - 3 λ) = 21 - 9 λ ⇒ x = ∆ x ∆ = - 7 - 3 λ ∆ y = 1 - 7 - 3 λ 2 - 2 - 3 λ = 1 · - 2 - 3 λ - - 7 - 3 λ · = 12 + 3 λ ⇒ y = ∆ y ∆ = 4 + λ
Общее решение системы уравнений x + 3 z + 7 = 0 2 x + 3 y + 3 z + 2 = 0 будет иметь вид x = - 7 - 3 λ y = 4 + λ z = λ , где λ ∈ R .
Для получения частного решения системы уравнений, которое даст нам искомые координаты точки, принадлежащей заданной прямой, нам необходимо взять конкретное значение параметра λ . Если λ = 0 , то x = - 7 - 3 · 0 y = 4 + 0 z = 0 ⇔ x = - 7 y = 4 z = 0 .
Это позволяет нам получить координаты искомой точки - 7 , 4 , 0 .
Проверим верность найденных координат точки методом подстановки их в исходные уравнения двух пересекающихся плоскостей - 7 + 3 · 0 + 7 = 0 2 · (- 7) + 3 · 4 + 3 · 0 + 2 = 0 ⇔ 0 = 0 0 = 0 .
Ответ : - 7 , 4 , 0
Направляющий вектор прямой, по которой пересекаются две плоскости
Давайте рассмотрим, как определить координаты направляющего вектора прямой, которая задана уравнениями двух пересекающихся плоскостей A 1 x + B 1 y + C 1 z + D 1 = 0 и A 2 x + B 2 y + C 2 z + D 2 = 0 . В прямоугольной системе координат 0хуz направляющий вектор прямой неотделим от прямой линии.
Как мы знаем, прямая перпендикулярна по отношению к плоскости в том случае, когда она перпендикулярна по отношению к любой прямой, лежащей в данной плоскости. Исходя из вышесказанного, нормальный вектор плоскости перпендикулярен любому ненулевому вектору, лежащему в данной плоскости. Эти два факта помогут нам в нахождении направляющего вектора прямой.
Плоскости α и β пересекаются по линии a . Направляющий вектор a → прямой линии a расположен перпендикулярно по отношению к нормальному вектору n 1 → = (A 1 , B 1 , C 1) плоскости A 1 x + B 1 y + C 1 z + D 1 = 0 и нормальному вектору n 2 → = (A 2 , B 2 , C 2) плоскости A 2 x + B 2 y + C 2 z + D 2 = 0 .
Направляющий вектор прямой a представляет собой векторное произведение векторов n → 1 = (A 1 , B 1 , C 1) и n 2 → = A 2 , B 2 , C 2 .
a → = n → 1 × n 2 → = i → j → k → A 1 B 1 C 1 A 2 B 2 C 2
Зададим множество всех направляющих векторов прямой как λ · a → = λ · n 1 → × n 2 → , где λ - это параметр, который может принимать любые действительные значения, отличные от нуля.
Пример 4
Пусть прямая в пространстве в прямоугольной системе координат O х у z задана уравнениями двух пересекающихся плоскостей x + 2 y - 3 z - 2 = 0 x - z + 4 = 0 . Найдем координаты любого направляющего вектора этой прямой.
Решение
Плоскости x + 2 y - 3 z - 2 = 0 и x - z + 4 = 0 имеют нормальные векторы n 1 → = 1 , 2 , - 3 и n 2 → = 1 , 0 , - 1 . Примем за направляющий вектор прямой линии, являющейся пересечением двух заданных плоскостей, векторное произведение нормальных векторов:
a → = n → 1 × n 2 → = i → j → k → 1 2 - 3 1 0 - 1 = i → · 2 · (- 1) + j → · (- 3) · 1 + k → · 1 · 0 - - k → · 2 · 1 - j → · 1 · (- 1) - i → · (- 3) · 0 = - 2 · i → - 2 j → - 2 k →
Запишем ответ в координатной форме a → = - 2 , - 2 , - 2 . Тем, кто не помнит, как это делается, рекомендуем обратиться к теме «Координаты вектора в прямоугольной системе координат».
Ответ: a → = - 2 , - 2 , - 2
Переход к параметрическим и каноническим уравнениям прямой в пространстве
Для решения ряда задач проще использовать параметрические уравнения прямой в пространстве вида x = x 1 + a x · λ y = y 1 + a y · λ z = z 1 + a z · λ или канонические уравнения прямой в пространстве вида x = x 1 + a x · λ y = y 1 + a y · λ z = z 1 + a z · λ . В этих уравнениях a x , a y , a z - координаты направляющего вектора прямой, x 1 , y 1 , z 1 - координаты некоторой точки прямой, а λ - параметр, принимающий произвольные действительные значения.
От уравнения прямой вида A 1 x + B 1 y + C 1 z + D 1 = 0 A 2 x + B 2 y + C 2 z + D 2 = 0 можно перейти к каноническим и параметрическим уравнениям прямой линии в пространстве. Для записи канонических и параметрических уравнений прямой нам понадобятся навыки нахождения координат некоторой точки прямой, а также координат некоторого направляющего вектора прямой, заданной уравнениями двух пересекающихся плоскостей.
Рассмотрим написанное выше на примере.
Пример 5
Зададим прямую линию в трехмерной системе координат уравнениями двух пересекающихся плоскостей 2 x + y - z - 1 = 0 x + 3 y - 2 z = 0 . Напишем канонические и параметрические уравнения этой прямой.
Решение
Найдем координаты направляющего вектора прямой, который является векторным произведением нормальных векторов n 1 → = 2 , 1 , - 1 плоскости 2 x + y - z - 1 = 0 и n 2 → = (1 , 3 , - 2) плоскости x + 3 y - 2 z = 0:
a → = n 1 → × n 2 → = i → j → k → 2 1 - 1 1 3 - 2 = i → · 1 · (- 2) + j → · (- 1) · 1 + k → · 2 · 3 - - k → · 1 · 1 - j → · 2 · (- 2) - i → · (- 1) · 3 = i → + 3 · j → + 5 · k →
Координаты направляющего вектора прямой a → = (1 , 2 , 5) .
Следующим шагом является определение координат некоторой точки заданной прямой линии, которыми является одно из решений системы уравнений: 2 x + y - z - 1 = 0 x + 3 y - 2 z = 0 ⇔ 2 x + y - z = 1 x + 3 y - 2 z = 0 .
Возьмем в качестве минорной матрицы системы определитель 2 1 1 3 = 2 · 3 - 1 · 1 = 5 , который отличен от нуля. В этом случае переменная z является свободной. Перенесем слагаемые с ней в правые части каждого уравнения и придаем переменной произвольное значение λ:
2 x + y - z = 1 x + 3 y - 2 z = 0 ⇔ 2 x + y = 1 + z x + 3 y = 2 z ⇔ 2 x + y = 1 + λ x + 3 y = 2 λ , λ ∈ R
Применяем для решения полученной системы уравнений метод Крамера:
∆ = 2 1 1 3 = 2 · 3 - 1 · 1 = 5 ∆ x = 1 + λ 1 2 λ 3 = (1 + λ) · 3 - 1 · 2 λ = 3 + λ ⇒ x = ∆ x ∆ = 3 + λ 5 = 3 5 + 1 5 · λ ∆ y = 2 1 + λ 1 2 λ = 2 · 2 λ - (1 + λ) · 1 = - 1 + 3 λ ⇒ y = ∆ y ∆ = - 1 + 3 λ 5 = - 1 5 + 3 5 · λ
Получаем: 2 x + y - z - 1 = 0 x + 3 y - 2 z = 0 ⇔ x = 3 5 + 1 5 y = - 1 5 + 3 5 z = λ
Примем λ = 2 для того, чтобы получить координаты точки прямой линии: x 1 = 3 5 + 1 5 · 2 y 1 = - 1 5 + 3 5 · 2 z 1 = 2 ⇔ x 1 = 1 y 1 = 1 z 1 = 2 . Теперь мы имеем достаточно данных для того, чтобы записать канонические и параметрические уравнения данной прямой в пространстве: x - x 1 a x = y - y 1 a y = z - z 1 a z ⇔ x - 1 1 = y - 1 3 = z - 2 5 x = x 1 + a x · λ y = y 1 + a y · λ z = z 1 + a z · λ ⇔ x = 1 + 1 · λ y = 1 + 3 · λ z = 2 + 5 · λ ⇔ x = 1 + λ y = 1 + 3 · λ z = 2 + 5 · λ
Ответ: x - 1 1 = y - 1 3 = z - 2 5 и x = 1 + λ y = 1 + 3 · λ z = 2 + 5 · λ
Данная задача имеет еще один способ решения.
Нахождение координат некоторой точки прямой проводится при решении системы уравнений A 1 x + B 1 y + C 1 z + D 1 = 0 A 2 x + B 2 y + C 2 z + D 2 = 0 .
В общем случае ее решения можно записать в виде искомых параметрических уравнений прямой в пространстве x = x 1 + a x · λ y = y 1 + a y · λ z = z 1 + a z · λ .
Получение канонических уравнений проводится следующим образом: решаем каждое из полученных уравнений относительно параметра λ , приравниваем правые части равенства.
x = x 1 + a x · λ y = y 1 + a y · λ z = z 1 + a z · λ ⇔ λ = x - x 1 a x λ = y - y 1 a y λ = z - z 1 a z ⇔ x - x 1 a x = y - y 1 a y = z - z 1 a z
Применим данный способ к решению задачи.
Пример 6
Зададим положение прямой линии уравнениями двух пересекающихся плоскостей 2 x + y - z - 1 = 0 x + 3 y - 2 z = 0 . Напишем параметрическое и каноническое уравнения для этой прямой линии.
Решение
Решение системы из двух уравнений с тремя неизвестными проводится аналогично тому, как мы делали это в предыдущем примере. Получаем: 2 x + y - z - 1 = 0 x + 3 y - 2 z = 0 ⇔ x = 3 5 + 1 5 · λ y = - 1 5 + 3 5 · λ z = λ .
Это параметрические уравнения прямой в пространстве.
Канонические уравнения получаем следующим образом: x = 3 5 + 1 5 · λ y = - 1 5 + 3 5 · λ z = λ ⇔ λ = x - 3 5 1 5 λ = y + 1 5 3 5 λ = z 1 ⇔ x - 3 5 1 5 = y + 1 5 3 5 = z 1
Полученные в обоих примерах уравнения отличаются внешне, однако они эквивалентны, так как определяют одно и то же множество точек трехмерного пространства, а следовательно и одну и ту же прямую линию.
Ответ: x - 3 5 1 5 = y + 1 5 3 5 = z 1 и x = 3 5 + 1 5 · λ y = - 1 5 + 3 5 · λ z = λ
Если вы заметили ошибку в тексте, пожалуйста, выделите её и нажмите Ctrl+Enter
Через каждую прямую в пространстве проходит бесчисленное множество плоскостей. Любые две из них, пересекаясь, определяют ее в пространстве. Следовательно, уравнения любых двух таких плоскостей, рассматриваемые совместно представляют собой уравнения этой прямой.
Вообще любые две не параллельные плоскости, заданные общими уравнениями
определяют прямую их пересечения. Эти уравнения называются общими уравнениями прямой
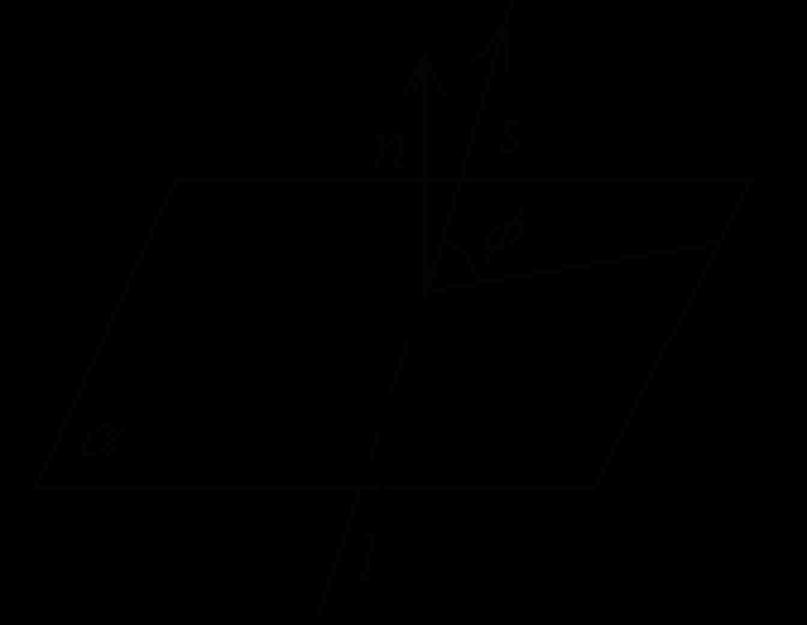
Билет 6 Записать выражение для угла между прямой и плоскостью, условие параллельности и перпендикулярности прямой и плоскости.
Углом между прямой и плоскостью будем называть угол, образованный прямой и её проекцией наплоскость. Пусть прямами плоскость заданы уравнениями
 Рассмотрим векторы и . Если угол между ними острый, то он будет , где φ – угол между прямой и плоскостью. Тогда
Рассмотрим векторы и . Если угол между ними острый, то он будет , где φ – угол между прямой и плоскостью. Тогда ![]() .
.
Если угол между векторами и тупой, то он равен . Следовательно ![]() . Поэтому в любом случае
. Поэтому в любом случае ![]() . Вспомнив формулу вычисления косинуса угла между векторами, получим
. Вспомнив формулу вычисления косинуса угла между векторами, получим  .
.
Условие перпендикулярности прямой и плоскости.
Прямая и плоскость перпендикулярны тогда и только тогда, когда направляющий вектор прямой и нормальный вектор плоскости коллинеарны, т.е. ![]() .
.
Условие параллельности прямой и плоскости. Прямая и плоскость параллельны тогда и только тогда, когда векторы и перпендикулярны.
Билет 7 . Дать определение эллипса. Записать уравнение эллипса в канонической форме. Вершины, фокусы, оси и эксцентриситет эллипса.
Определение: Эллипсом называется геометрическое место точек плоскости, для каждой из которых сумма расстояний до двух данных точек той же плоскости, называемых фокусами эллипса, есть величина постоянная.
Пусть F 1 и F 2 – фокусы эллипса. Начало O системы координат расположим на середине отрезка F 1 F 2 . Ось Ox направим вдоль этого отрезка, ось Oy – перпендикулярно к этому отрезку (рис.).

Определение: Точки пересечения эллипса с его осями симметрии называются вершинами эллипс а, центр симметрии – центром эллипса , отрезок между двумя вершинами, содержащий фокусы, называется большой осью эллипса , половина его длины – большой полуосью эллипса . Отрезок между вершинами на оси симметрии, не содержащей фокусов, называется малой осью эллипса , половина его длины – малой полуосью. Величина называется эксцентриситетом эллипса .
Если эллипс задан каноническими уравнениями, то его вершины имеют координаты (–a ;0), (a ;0),(0; –b ), (0;b ), большая полуось равна a , малая полуось равна b . Величина c , являющаяся половиной расстояния между фокусами, определяется из формулы c 2 = a 2 – b 2 .
Эксцентриситет эллипса характеризует степень вытянутости эллипса. Чем ближе эксцентриситет к нулю, тем больше эллипс похож на окружность. Чем ближе эксцентриситет к 1, тем сильнее вытянут эллипс. Отметим, что по определению для эллипса 0< <1.
Уравнение называется каноническим уравнением эллипса .

Билет 8 Дать определение гиперболы. Записать уравнение гиперболы в канонической форме. Вершины, фокусы, оси, асимптоты и эксцентриситет гиперболы,
Определение: Гиперболой называется геометрическое место точек плоскости, для каждой из которых абсолютная величина разности расстояний до двух фиксированных точек той же плоскости, называемых фокусами гиперболы, есть величина постоянная.
Так же, как и в случае эллипса, для получения уравнения гиперболы выберем подходящую систему координат. Начало координат расположим на середине отрезка между фокусами, ось Ox направим вдоль этого отрезка, а ось ординат – перпендикулярно к нему.
Уравнение называется каноническим уравнением гиперболы.
Гипербола обладает двумя взаимно перпендикулярными осями симметрии, на одной из которых лежат фокусы гиперболы, и центром симметрии. Если гипербола задана каноническим уравнением, то ее осями симметрии служат координатные оси Ox и Oy , а начало координат – центр симметрии гиперболы.
Определение: Точки пересечения гиперболы, заданной каноническим уравнением с осью Ox называются вершинами гиперболы , отрезок между ними называется действительной осью гиперболы . Отрезок оси ординат между точками (0;–b ) и (0;b ) называется мнимой осью. Числа a и b называются соответственно действительной и мнимой полуосями гиперболы. Начало координат называется ее центром. Величина называется эксцентриситетом гиперболы.
Замечание: Из равенства b 2 = c 2 – a 2 следует, что c >a , то есть у гиперболы >1. Эксцентриситет характеризует угол между асимптотами, чем ближе к 1, тем меньше этот угол.

Билет 9. Дать определение параболы. Записать уравнение параболы в канонической форме. Директриса, фокус параболы
Параболой называется геометрическое место точек плоскости, равноудаленных от заданной точки F и заданной прямой d, не проходящей через заданную точку. Это геометрическое определение выражает директориальное свойство параболы .
Директориальное свойство параболы Точка F называется фокусом параболы, прямая d - директрисой параболы, середина O перпендикуляра, опущенного из фокуса на директрису, - вершиной параболы, расстояние p от фокуса до директрисы - параметром параболы, а расстояние p2 от вершины параболы до её фокуса - фокусным расстоянием (рис,а). Прямая, перпендикулярная директрисе и проходящая через фокус, называется осью параболы (фокальной осью параболы). Отрезок FM , соединяющий произвольную точку M параболы с её фокусом, называется фокальным радиусом точки M. Отрезок, соединяющий две точки параболы, называется хордой параболы.
Для произвольной точки параболы отношение расстояния до фокуса к расстоянию до директрисы равно единице. Сравнивая директориальные свойства эллипса, гиперболы и параболы, заключаем, что эксцентриситет параболы по определению равен единице
.Геометрическое определение параболы , выражающее её директориальное свойство, эквивалентно её аналитическому определению - линии, задаваемой каноническим уравнением параболы:

Билет 10 . Что такое квадратная, единичная, симметрическая, ортогональная матрица. Дать определение транспонированной и обратной матрицы.
Определение 1. Матрицей называется прямоугольная таблица из чисел, содержащая - строк и - столбцов. .
Определение 2. Числа И называются Порядками матрицы (или говорят, что матрица имеет размер )
Определение 3. Числа , входящие в состав данной матрицы, называются ее элементами .
1.Определение 4. Матрица называется Квадратной если число строк равно числу столбцов. В случае квадратной матрицы вводятся понятия Главной диагонали (это числа - ) и Побочной диагонали (это числа - ).
2.Симметричной (Симметрической) называют квадратную матрицу, элементы которой симметричны относительно главной диагонали. Более формально, симметричной называют такую матрицу , что .
Это означает, что она равна её транспонированной матрице:
3. Единичной матрицей называется диагональная матрица, у которой все диагональные элементы равны единице. Например, единичной матрицей третьего порядка является матрица

Ортогональная матрица
Квадратная матрица A , для которой A -1 = A T называется ортогональной матрицей . Основные свойства ортогональной матрицы: Модуль определителя ортогональной матрицы равен единице. Это свойство следует из свойств определителей:
Сумма квадратов элементов любого столбца ортогональной матрицы равна единице.
Скалярное произведение строки на саму себя равно 1, а на любую другую строку - 0. Так же и для столбцов.
Сумма произведений элементов любой строки ортогональной матрицы на соответствующие элементы другой строки равна нулю.
Обратной матрицей
называется матрица, которая при умножении как справа, так и слева на данную матрицу дает единичную матрицу.Обозначим обратную матрицу к матрице А
через , тогда согласно определению получим: ![]() где Е
– единичная матрица.
где Е
– единичная матрица.
Обратная матрица существует не для всех матриц. Необходимым и достаточным условием невырожденности является
det(A ) ≠ 0 или rank(A ) = N .
Свойства обратной матриц
· , где обозначает определитель.
· для любых двух обратимых матриц и .
· , где обозначает транспонированную матрицу.
· для любого коэффициента .
· Если необходимо решить систему линейных уравнений , (b - ненулевой вектор) где - искомый вектор, и если существует, то . В противном случае либо размерность пространства решений больше нуля, либо их нет вовсе.
Транспонированная матрица - матрица , полученная из исходной матрицы заменой строк на столбцы.
Формально, транспонированная матрица для матрицы размеров - матрица размеров , определённая как .
Билет 11. Что такое эквивалентные матрицы. Перечислите элементарные преобразования матриц. Что можно сказать о рангах эквивалентных матриц.
Определение. Матрицы, полученные в результате элементарного преобразования, называются эквивалентными.
Элементарными преобразованиями над строками матриц называются следующие преобразования строк:
1. умножение строки на ненулевое число;
2. перестановка двух строк;
3. прибавление к одной строке матрицы другой ее строки, умноженной на некоторое ненулевое число.
4. Если от матрицы к матрице перешли с помощью эквивалентных преобразований над строками, то такие матрицы называются эквивалентными и обозначают .
5. Метод элементарных преобразований
6. Ранг матрицы равен числу ненулевых строк в матрице после приведения её к ступенчатой форме при помощи элементарных преобразований над строками матрицы.
Билет 12 , Что такое базисный минор. Сформулируйте теорему о базисном миноре.
Определение.
Ранг матрицы А - максимальный порядок неравного нулю минора (минор - определитель квадратной матрицы ![]() ). Обозначается .
). Обозначается .
Определение. Минор, определяющий ранг матрицы, называется Базисным минором. Строки и столбцы, формирующие БМ, называются базисными строками и столбцами.
Определение.
Система столбцов ![]() называется линейно зависимой числа , не все равные нулю и такие что:
называется линейно зависимой числа , не все равные нулю и такие что:
Теорема о Базисном миноре
Столбцы матрицы , входящие в базисный минор, образуют линейно независимую систему. Любой столбец матрицы линейно выражается через остальные столбцы из базисного минора.
В матрице размеров минор -го порядка называется базисным, если он отличен от нуля, а все миноры -ro порядка равны нулю или их вообще не существует.
Следствие. Если все столбцы матрицы линейно выражаются через столбцов , которые образуютлинейно независимую систему, то ранг матрицы .
Билет 13 Что такое однородная и неоднородная система уравнений. Что называется решением системы уравнений. Поясните термины: совместная система уравнений, несовместная система уравнений. Какие системы уравнений называются эквивалентными?
Определение 1. Если все свободные члены равны нулю, то система называется однородной, и неоднородной - в противном случае.
Определение 2. Решением системы называется совокупность из n чисел с 1 , с 2 , …, с n , при подстановке которой в систему вместо неизвестных будет получено m числовых тождеств.
Определение 3. Система называется совместной (несовместной), если она имеет хотя бы одно решение (не имеет решений).
Определение 4. Совместная система линейных алгебраических уравнений называется определённой (неопределённой), если она имеет единственное решение (множество решений).
Определение.
Две системы линейных уравнений называют равносильными (эквивалентными ), если они имеют одни и те же решения.
Эквивалентные системы получаются, в частности, при элементарных преобразованиях системы при условии, что преобразования выполняются только над строками системы.
Билет 14 Что такое фундаментальная система решений однородной системы уравнений. Что называется общим решением однородной системы уравнений.
Определение. Базис пространства решений системы линейных однородных уравнений называется её фундаментальной системой решений.
Теорема о структуре общего решения однородной системы уравнений:
Любое решение однородной системы линейных уравнений определяется формулой
где X 1 , X 2 , … , X n − r - фундаментальная система решений однородной системы линейных уравнений и C 1 , C 2 , … , C n − r - произвольные постоянные.
Свойства общего решения однородной системы уравнений :
1. При любых значениях C 1 , C 2 , … , C n − r X , определяемое формулой (3), является решением системы (1).
2. Каково бы ни было решение X 0 , существуют числа C 1 0 , … , C n − r 0 такие, что
Вывод:
Чтобы найти фундаментальную систему и общее решение однородной системы, нужно найти базис ядра соответствующего линейного оператора.
Билет 16 . Дать определение линейного пространства и сформулировать его свойства.
Множество L называется линейным или векторным пространством , если для всех элементов (векторов) этого множества определены операции сложения и умножения на число и справедливо:
1. Каждой паре элементов x и y из L отвечает элемент x + y из L , называемый суммой x и y , причём:
x + y = y + x − сложение коммутативно;
x + (y + z) = (x + y) + z − сложение ассоциативно;
x +0 = x − существует единственный нулевой элемент 0 (x +0 = x для любого x из L );
x + (− x )= 0 − для каждого элемента x из L существует единственный противоположный элемент −x (x + (−x) = 0 для любого x изL ) .
2. Каждой паре x и α, где α − число, а x элемент из L , отвечает элемент α·x , наываемый произведением α и x , причём:
α·(β· x ) = (α·β)· x − умножнение на число ассоциативно: ;
1· x = x − для любого элемента x из L .
3. Операции сложения и умножения на число связаны соотношениями:
α·(x + y ) = α·x + α·y − умножнение на число дистрибутивно относительно сложения элементов;
(α + β)· x = α·x + β· x − умножнение на вектор дистрибутивно относительно сложения чисел.
Билет 17 . Подпространство линейного пространства. Его свойства. Линейная оболочка.
Определение линейного подпространства
Непустое подмножество L линейного пространства V называется линейным подпространством пространства V, если
1) u+v∈L ∀u,v∈L (подпространство замкнуто по отношению к операции сложения);
2) λv∈L ∀v∈L и любого числа λ (подпространство замкнуто по отношению к операции умножения вектора на число).
Свойство 1 Всякое подпространство линейного пространства R есть линейное пространство.
Свойство 2 dim M ≤ dim Rn.
Свойство 3 (о пополнении базиса) . Если (ep)k - базис в подпространстве M линейного пространства Rn, причем k < n, то можно так выбрать элементы в Rn ek+1, ek+2, . . . , en, что (ep)n будет базисом в Rn.
О п р е д е л е н и е.Линейная оболочка - это набор векторов, которые задают линейное подпространство. Строго говоря, линейная оболочка - это множество всех линейных комбинаций данных векторов. Так же обозначим особенности:
Билет 18 . Дать определение евклидова пространства. Поясните операцию нормирование вектора.
Определение Пусть V - векторное пространство. Говорят, что в V задано скалярное произведение, если любым двум векторам x, y ∈ V поставлено в соответствие действительное число, называемое скалярным произведением этих векторов и обозначаемое через xy или (x, y), так, что выполнены следующие условия (здесь x, y, z - произвольные векторы из V, а
t - произвольное действительное число):
1) xy = yx (скалярное произведение коммутативно);
2) (tx)y = t(xy);
3) (x + y)z = xz + yz (скалярное произведение дистрибутивно относительно сложения);
4) xx >=0, причем xx = 0 тогда и только тогда, когда x = 0.
Векторное пространство, в котором задано скалярное произведение, называется евклидовым. Свойства 1)–4) называются аксиомами евклидова пространства.
Вектор называют нормированным или единичным
, если его длина равна единице. Нормировать произвольный ненулевой вектор - это поделить его на длину. Получится единичный вектор, сонаправленный исходному.
Скалярное произведение произвольного вектора на единичный даст точную длину проекции этого вектора на направление единичного. Чтобы получить не просто длину, а сам вектор-проекцию, надо умножить эту длину на наш единичный вектор:
Билет 19 Что такое ортонормированный базис. Поясните процесс ортогонализации Грама-Шмидта на примере двумерного базиса.
Ортонормированная система, состоящая из n векторов n -мерного евклидова пространства, образует базис этого пространства. Такой базис называется ортонормированным базисом.
Если e 1 , e 2 , ..., e n - ортонормированный базис n -мерного евклидова пространства и
x = x 1 e 1 + x 2 e 2 + ... + x n e n - разложение вектора x по этому базису, то координаты x i вектора x в ортонормированном базисе вычисляются по формулам x i =(x, e i ), i = 1, 2, ..., n .
ГРАМА-ШМИДТА, Дана линейно независимая система векторов b 1 , b 2 , …, b l , a l+1 , …, a n l ≥ 1 (1)часть, которой ортогональна, обозначим b l+1 ортогональную составляющую вектора а l+1 относительно ортогональной системыb 1 , b 2 , …, b l . Тогда1. Система векторовb 1 , b 2 , …, b l , b l+1 , a l+2 , …, a n (2) эквивалентна (1).
2. Система векторов (2) линейно независима, а ее часть b 1 , b 2 , …, b l , b l+1 – ортогональна.Используя, понятие ортогональной составляющей, опишем процесс превращения линейно независимой системы а 1 , а 2 , …, а n в ортогональную системуb 1 , b 2 , …, b n ненулевых векторов, который называется ортогонализацией системы а 1 , а 2 , …, а n .Этот процесс состоит из n–шагов, n–число векторов в исходной системе а 1 , а 2 , …, а n .
1 шаг. Полагаем b 1 =а 1 и получаем системуb 1 , а 2 , …, а n
2 шаг. Заменим в системе (3) вектор а 2 ортогональной составляющей относительно b 1 , и получим систему:b 1 ,b 2 , а 3 ,…,а n (4)
Согласно шагам ортогонализации система (4) линейно независима, а ее часть b 1 , b 2 –ортогональна.
Предположим, что уже построена линейно независимая система b 1 , b 2 , …, b k-1 , a k ,…, a n , (5)
у которой b 1 , b 2 , …, b k-1 – ортогональны.
На k-том шаге k = 3, n заменим в системе (5) векторa k его ортогональной составляющей относительно системы b 1 , b 2 , …, b k-1 и получим системуb 1 , …,b k , a k+1 , …, a n .
После выполнения n–го шага получим линейно независимую и ортогональную систему векторов b 1 , b 2 , …, b n .
Билет 20 .Дать определение оператора в линейном пространстве. Какой оператор называется линейным.
Оператором называется правило, по которому каждому элементу x X ставится в соответствие единственный элемент y некоторого непустого множества Y . Говорят, что оператор действует из X в Y .
Действие оператора обозначают y = A (x ), y - образ x , x - прообраз y .
Если каждый элемнт y из Y имеет единственный прообраз x из X , y = A (x ), оператор называют взаимно однозначным отображением X в Y или преобразованием X , X - область определения оператора.
Пусть X и Y два линейные пространства. Оператор A , действующий из X в Y , называется линейным оператором , если для любых двух элементовu и v из X и любого числа α справедливо:
A (u + v ) = A (u ) + A (v ) , A (α·u ) = α· A (u ).
Билет 21. Приведите пример линейного оператора. Какие действия над линейными операторами Вы знаете?

Канонические уравнения прямой
Постановка задачи. Найти канонические уравнения прямой, заданной как линия пересечения двух плоскостей (общими уравнениями)
План решения.
Канонические уравнения прямой с направляющим вектором ![]() , проходящей через данную точку
, проходящей через данную точку ![]() , имеют вид
, имеют вид
 . (1)
. (1)
Поэтому, чтобы написать канонические уравнения прямой, необходимо найти ее направляющий вектор и какую-нибудь точку на прямой.
1. Так как прямая принадлежит одновременно обеим плоскостям, то ее направляющий вектор ортогонален нормальным векторам обеих плоскостей, т.е. согласно определению векторного произведения, имеем
 . (2)
. (2)
2. Выбираем какую-нибудь точку на прямой. Поскольку направляющий вектор прямой не параллелен хотя бы одной из координатных плоскостей, то прямая пересекает эту координатную плоскость. Следовательно, в качестве точки на прямой может быть взята точка ее пересечения с этой координатной плоскостью.
3. Подставляем найденные координаты направляющего вектора и точки в канонические уравнения прямой (1).
Замечание. Если векторное произведение (2) равно нулю, то плоскости не пересекаются (параллельны) и записать канонические уравнения прямой не представляется возможным.
Задача 12. Написать канонические уравнения прямой.
Канонические уравнения прямой:
 ,
,
где ![]() – координаты какой-либо точки прямой,
– координаты какой-либо точки прямой, ![]() – ее направляющий вектор.
– ее направляющий вектор.

Найдем какую-либо точку прямой ![]() . Пусть , тогда
. Пусть , тогда

Следовательно, ![]() – координаты точки, принадлежащей прямой.
– координаты точки, принадлежащей прямой.
Прямая в пространстве может быть определена как линия пересечения двух непараллельных плоскостей и, то есть как множество точек, удовлетворяющих системе двух линейных уравнений
 (V.5)
(V.5)
Справедливо
и обратное утверждение: система двух
независимых линейных уравнений вида
(V.5)
определяет прямую как линию пересечения
плоскостей (если они не параллельны).
Уравнения системы (V.5)
называются общим
уравнением
прямой
в пространстве
 .
.
Пример V .12 . Составить каноническое уравнение прямой, заданной общими уравнениями плоскостей

Решение . Чтобы написать каноническое уравнение прямой или, что тоже самое, уравнение прямой, проходящей через две данные точки, нужно найти координаты каких-либо двух точек прямой. Ими могут служить точки пересечения прямой с какими-нибудь двумя координатными плоскостями, например Oyz и Oxz .
Точка
пересечения прямой с плоскостью Oyz
имеет абсциссу
 .
Поэтому, полагая в данной системе
уравнений
.
Поэтому, полагая в данной системе
уравнений ,
получим систему с двумя переменными:
,
получим систему с двумя переменными:

Ее
решение
 ,
, вместе с
вместе с определяет точку
определяет точку искомой прямой. Полагая в данной системе
уравнений
искомой прямой. Полагая в данной системе
уравнений ,
получим систему
,
получим систему

решение
которой
 ,
, вместе с
вместе с определяет точку
определяет точку пересечения прямой с плоскостьюOxz
.
пересечения прямой с плоскостьюOxz
.
Теперь
запишем уравнения прямой, проходящей
через точки
 и
и :
: или
или ,
где
,
где будет направляющим векто-ром этой
прямой.
будет направляющим векто-ром этой
прямой.
Пример
V
.13.
Прямая задана
каноническим уравнением
 .
Составить общее уравнение этой прямой.
.
Составить общее уравнение этой прямой.
Решение. Каноническое уравнение прямой можно записать в виде системы двух независимых уравнений:


Получили
общее уравнение прямой, которая теперь
задана пересечением двух плоскостей,
одна из которых
 параллельна осиOz
(
параллельна осиOz
( ),
а другая
),
а другая – осиОу
(
– осиОу
( ).
).
Данную прямую можно представить в виде линии пересечения двух других плоскостей, записав ее каноническое уравнение в виде другой пары независимых уравнений:


Замечание . Одна и та же прямая может быть задана различными системами двух линейных уравнений (то есть пересечением различных плоскостей, так как через одну прямую можно провести бесчисленное множество плоскостей), а также различными каноническими уравнениями (в зависимости от выбора точки на прямой и ее направляющего вектора).
Ненулевой вектор, параллельный прямой линии, будем называть ее направляющим вектором .
Пусть
в трехмерном пространстве
 задана прямая l
,
проходящая через точку
задана прямая l
,
проходящая через точку
 ,
и ее направляющий вектор
,
и ее направляющий вектор .
.
Любой
вектор
 ,
где
,
где ,
лежащий на прямой, коллинеарен с вектором
,
лежащий на прямой, коллинеарен с вектором ,
поэтому их координаты пропорциональны,
то есть
,
поэтому их координаты пропорциональны,
то есть
 .
(V.6)
.
(V.6)
Это уравнение называется каноническим уравнением прямой. В частном случае, когда ﻉ есть плоскость, получаем уравнение прямой на плоскости
 .
(V.7)
.
(V.7)
Пример
V
.14.
Найти уравнение прямой, проходящей
через две точки
 ,
, .
.
 ,
,
где
 ,
, ,
, .
.
Удобно уравнение (V.6) записать в параметрической форме. Так как координаты направляющих векторов параллельных прямых пропорциональны, то, полагая
 ,
,

где
t
– параметр,
 .
.
Расстояние от точки до прямой
Рассмотри
двухмерное евклидовое пространство ﻉ
с
декартовой системой координат. Пусть
точка
 ﻉ
и
l
ﻉ.
Найдем расстояние от этой точки до
прямой. Положим
ﻉ
и
l
ﻉ.
Найдем расстояние от этой точки до
прямой. Положим
 ,
и прямая l
задается уравнением
,
и прямая l
задается уравнением
 (рис.V.8).
(рис.V.8).
Расстояние
 ,
вектор
,
вектор
 ,
где
,
где
 – нормальный вектор прямой l
,
– нормальный вектор прямой l
,
 и
и
 – коллинеарны, поэтому их координаты
пропорциональны, то есть
– коллинеарны, поэтому их координаты
пропорциональны, то есть
 ,
следовательно,
,
следовательно,
 ,
,
 .
.

Отсюда
 или умножая эти уравнения
наA
и B
соответственно и складывая их, находим
или умножая эти уравнения
наA
и B
соответственно и складывая их, находим
 ,
отсюда
,
отсюда
 .
.
 (V.8)
(V.8)
определяет
расстояние от точки
 до прямой
до прямой .
.
Пример
V
.15.
Найти уравнение прямой, проходящей
через точку
 перпендикулярно прямойl
:
перпендикулярно прямойl
:
 и найти расстояние от
и найти расстояние от до прямойl
.
до прямойl
.
Из
рис. V.8
имеем
 ,
а нормальный вектор прямойl
,
а нормальный вектор прямойl
 .
Из условия перпендикулярности имеем
.
Из условия перпендикулярности имеем
Так
как
 ,
то
,
то
 .
(V.9)
.
(V.9)
Это
и есть уравнение прямой, проходящей
через точку
 ,перпендикулярно
прямой
,перпендикулярно
прямой
 .
.
Пусть
имеем уравнение прямой (V.9),
проходящей через точку
 ,
перпендикулярна прямойl
:
,
перпендикулярна прямойl
:
 .
Найдем расстояние от точки
.
Найдем расстояние от точки до прямойl
,
используя формулу (V.8).
до прямойl
,
используя формулу (V.8).
Для
нахождения искомого расстояния достаточно
найти уравнение прямой, проходящей
через две точки
 и точку
и точку ,
лежащую на прямой в основании
перпендикуляра. Пусть
,
лежащую на прямой в основании
перпендикуляра. Пусть
 ,
тогда
,
тогда
Так
как
 ,
а вектор
,
а вектор ,
то
,
то
 .
(V.11)
.
(V.11)
Поскольку
точка
 лежит на прямойl
,
то имеем еще одно равенство
лежит на прямойl
,
то имеем еще одно равенство
 или
или

Приведем систему к виду, удобному для применения метода Крамера

Ее решение имеет вид
 ,
,
 .
(V.12)
.
(V.12)
Подставляя (V.12) в (V.10), получаем исходное расстояние.
Пример
V
.16.
В двухмерном пространстве задана точка
 и прямая
и прямая .
Найти расстояние от точки
.
Найти расстояние от точки до прямой; записать уравнение прямой,
проходящей через точку
до прямой; записать уравнение прямой,
проходящей через точку перпендикулярно заданной прямой и найти
расстояние от точки
перпендикулярно заданной прямой и найти
расстояние от точки до основания перпендикуляра к исходной
прямой.
до основания перпендикуляра к исходной
прямой.
По формуле (V.8) имеем
Уравнение
прямой, содержащей перпендикуляр, найдем
как прямую, проходящую через две точки
 и
и ,
воспользовавшись формулой (V.11).
Так как
,
воспользовавшись формулой (V.11).
Так как
 ,
то, с учетом того, что
,
то, с учетом того, что ,
а
,
а ,
имеем
,
имеем
 .
.
Для
нахождения координат
 имеем систему с учетом того, что точка
имеем систему с учетом того, что точка лежит на исходной прямой
лежит на исходной прямой

Следовательно,
 ,
, ,
отсюда.
,
отсюда.
Рассмотрим
трехмерное евклидовое пространство ﻉ.
Пусть точка
 ﻉ
и
плоскость ﻉ.
Найдем расстояние от этой точки
ﻉ
и
плоскость ﻉ.
Найдем расстояние от этой точки
 до плоскости,
заданной уравнением
(рис.V.9).
до плоскости,
заданной уравнением
(рис.V.9).

Аналогично
двухмерному пространству имеем
 и вектор
и вектор ,
а,
отсюда
,
а,
отсюда
 .
(V.13)
.
(V.13)
Уравнение
прямой, содержащей перпендикуляр к
плоскости ,
запишем как уравнение прямой, проходящей
через две точки
 и
и ,
лежащую в плоскости:
,
лежащую в плоскости:
 .
(V.14)
.
(V.14)
Для
нахождения координат точки
 к двум любым равенствам формулы (V.14)
добавим уравнение
к двум любым равенствам формулы (V.14)
добавим уравнение
Решая
систему трех уравнений (V.14),
(V.15),
найдем
 ,
, ,
, – координаты точки
– координаты точки .
Тогда уравнение перпендикуляра запишется
в виде
.
Тогда уравнение перпендикуляра запишется
в виде
 .
.
Для
нахождения расстояния от точки
 до плоскости
вместо формулой (V.13)
воспользуемся
до плоскости
вместо формулой (V.13)
воспользуемся
Пусть в канонических уравнениях прямой
коэффициент отличен от нуля, т. е. прямая не параллельна плоскости хОу. Запишем эти уравнения раздельно в таком виде:
При нашем условии уравнения (6) вполне определяют прямую. Каждое из них в отдельности выражает плоскость, причем первая из них параллельна оси Оу, а вторая - оси
Таким образом, представляя прямую линию уравнениями вида (6), мы рассматриваем ее как пересечение двух плоскостей, проектирующих эту прямую на плоскости координат xOz и yOz. Первое из уравнений (6), рассматриваемое в плоскости определяет проекцию данной прямой линии на эту плоскость; точно так же второе из уравнений (6), рассматриваемое в плоскости определяет проекцию данной прямой линии на плоскости yOz. Итак, можно сказать, что дать уравнения прямой линии в виде (6) - это значит дать ее проекции на плоскости координат хOz и yOz.
Если бы направляющий коэффициент был ранен нулю, то обязательно хотя бы один из двух других коэффициентов, например , был бы отличен от нуля, т. е. прямая не была бы параллельна плоскости yOz. В этом случае мы могли бы выразить прямую
уравнениями плоскостей, проектирующих ее на координатные плоскости записав уравнения (5) в виде
Таким образом, любая прямая может быть выражена уравнениями двух плоскостей, проходящих через нее и проектирующих ее на координатные плоскости. Но определять прямую совсем не обязательно именно такой парой плоскостей.
Через каждую прямую проходит бесчисленное множество плоскостей. Любые две из них, пересекаясь, определяют ее в пространстве. Следовательно, уравнения любых двух таких плоскостей, рассматриваемые совместно, представляют собой уравнения этой прямой.
Вообще всякие две не параллельные между собой плоскости с общими уравнениями
![]()
определяют прямую их пересечения.
Уравнения (7), рассматриваемые совместно, называются общими уравнениями прямой.
От общих уравнений прямой (7) можно перейти к ее каноническим уравнениям. Для этой цели мы должны знать какую-нибудь точку прямой и направляющий вектор.
Координаты точки легко найдем из данной системы уравнений, выбирая одну из координат произвольно и решая после этого систему двух уравнений втносителыю оставшихся двух координат.
Для отыскания направляющего вектора прямой заметим, что этот вектор, направленный по линии пересечения данных плоскостей, должен быть перпендикулярным к обоим нормальным векторам этих плоскостей. Обратно, всякий вектор, перпендикулярный к параллелен обеим плоскостям, а следовательно, и данной прямой.
Но векторное произведение также обладает этим свойством. Поэтому за направляющий вектор прямой можно принять векторное произведение нормальных векторов данных плоскостей.
Пример 1. Привести к каноническому виду уравнения прямой
Выберем произвольно одну из координат. Пусть, иапример, . Тогда
откуда Итак, мы нашли точку (2, 0, 1), лежащую на прямой,
Находя теперь векторное произведение векторов получаем направляющий вектор прямой Поэтому канонические уравнения будут:
![]()
Замечание. От общих уравнений прямой вида (7) можно перейти к каноническим, и не прибегая к векторному методу.
Предварительно остановимся несколько подробнее на уравнениях
Выразим из них х и у через . Тогда получим:
где положено

Уравнения (6) называются уравнениями прямой в проекциях на плоскости
Установим геометрический смысл постоянных М и N: М представляет собой угловой коэффициент проекции данной прямой на плоскость координат (тангенс угла этой проекции с осью Oz), а N есть угловой коэффициент проекции данной прямой на плоскость координат (тангенс угла этой проекции с осью Oz). Таким образом, числа определяют направления проекций данной прямой линии на две плоскости координат, а значит, они характеризуют и направление самой данной прямой. Поэтому числа М и N называют угловыми коэффициентами данной прямой.
Чтобы выяснить геометрический смысл постоянных положим в уравнениях (6) прямой линии тогда получим: т. е. точка лежит на данной прямой. Очевидно, эта точка есть точка пересечения данной прямой с плоскостью Итак, суть координаты следа данной прямой линии на плоскости координат
Теперь легко сделать переход от уравнений в проекциях к каноническим. Пусть, например, даны уравнения (6). Решая эти уравнения относительно , найдем:
![]()
откуда непосредственно получаем канонические уравнения в виде
![]()
Пример 2. Привести канонические уравнения прямой
![]()
к уравнениям в проекциях на плоскости
Данные уравнения переписываем в виде
![]()
Решая первое из этих уравнений относительно х, а второе относительно у, найдем искомые уравнения в проекциях:
Пример 3. Привести уравнения в ппоекциях
к каноническому виду.
Решая данные уравнения относительно , получим.



